
簡介
機器人運動學包括正向運動學和逆向運動學,正向運動學即給定機器人各關節變數,計算機器人末端的位置姿態; 逆向運動學即已知機器人末端的位置姿態,計算機器人對應位置的全部關節變數。一般正向運動學的解是唯一和容易獲得的,而逆向運動學往往有多個解而且分析更為複雜。機器人逆運動分析是運動規劃不控制中的重要問題,但由於機器人逆運動問題的複雜性和多樣性,無 法建立通用的解析算法。逆運動學問題實際上是一個非線性超越方程組的求解問題,其中包括解的存在性、唯一性及求解的方法等一系複雜問題。
位姿描述
表示
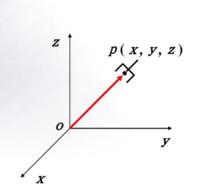
機器人的位姿主要是指機器人手部在空間的位置和姿態,有時也會用到其他各個活動桿件在空間的位置和姿態。位置可以用一個位置矩陣來描述。
 機器人運動學
機器人運動學 機器人運動學
機器人運動學姿態可以用坐標系三個坐標軸兩兩夾角的餘弦值組成的姿態矩陣來表示。
 機器人運動學
機器人運動學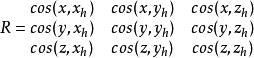 機器人運動學
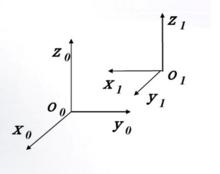
機器人運動學舉個例子:
右圖所示的兩坐標系的姿態為
 機器人運動學
機器人運動學 機器人運動學
機器人運動學坐標
機器人的坐標系包括手部坐標系,機座坐標系,桿件坐標系,絕對坐標系。
手部坐標系:參考機器人手部的坐標系,也稱機器人位姿坐標系,它表示機器人手部在指定坐標系中的位置和姿態。
機座坐標系:參考機器人基座的坐標系,它是機器人各活動桿件和手部的公共參考坐標系。
桿件坐標系:參考機器人桿件的坐標系,它是在機器人每個活動桿上固定的坐標系,隨桿件的運動而運動。
絕對坐標系:參考工作現場地面的坐標系,它是機器人所有構件的公共參考坐標系 。
手部坐標系{h};機座坐標式{0};桿件坐標系{i}(i-1,2,...n);絕對坐標系{B}。
運動學方程
概念
機器人運動學的一般模型為:
 機器人運動學
機器人運動學 機器人運動學
機器人運動學其中,M為機器人末端執行器的位姿, 為機器人各個關節變數。
機器人運動學若給定 ,要求確定相應的M,稱為正運動學問題,簡記為DKP。相反,若已知末端執行器的位姿M,求解對應的關節變數,稱為逆運動學問題。簡記為IKP。
求解正運動問題,是為了檢驗,校準機器人,計算工作空間等;求解逆運動問題,是為了路徑規劃,機器人控制,但求解比較困難。
舉例
 機器人運動學
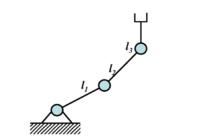
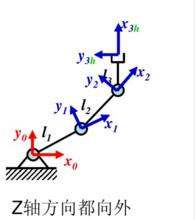
機器人運動學建立三自由度平面關節機器人如圖所示,設機器人桿件1,2,3長度為 ,建立機器人的運動學方程。
 機器人運動學
機器人運動學1、建立坐標系
機座坐標系{0};桿件坐標系{i};手部坐標系{h}與末端坐標系{n}重合。
 機器人運動學
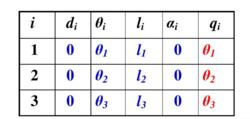
機器人運動學2、確定參數
各個軸線相互平行,各個桿件處於同一平面內。
 機器人運動學
機器人運動學3、相鄰桿件位姿矩陣
 機器人運動學
機器人運動學同理可得:
 機器人運動學
機器人運動學同理可得:
 機器人運動學
機器人運動學4、建立方程
將相鄰桿件位姿方程依次相乘,則有
 機器人運動學
機器人運動學 機器人運動學
機器人運動學式中,
 機器人運動學
機器人運動學為了說明位姿矩陣中各個元素的作用,可以寫為:
 機器人運動學
機器人運動學若用方程組表示,則為:
 機器人運動學
機器人運動學 機器人運動學
機器人運動學 機器人運動學
機器人運動學 機器人運動學
機器人運動學 機器人運動學
機器人運動學 機器人運動學
機器人運動學