
急回運動
 四桿機構的極位夾角
四桿機構的極位夾角 急回特性
急回特性 急回特性
急回特性 急回特性
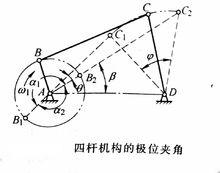
急回特性右圖所示為一曲柄搖桿機構,設曲柄AB為原動件,在其轉動一周的過程中有兩次與連桿共線,這時搖桿CD分別處於兩極限位置 和 。機構所處的這兩個位置稱為極位。機構在兩個極位時,原動件AB所在兩個位置之間的夾角 稱為極位夾角(crank angle between two limit positions)。
 急回特性
急回特性 急回特性 急回特性 急回特性
急回特性 急回特性 急回特性 急回特性
急回特性 急回特性
急回特性 急回特性
急回特性 急回特性 急回特性 急回特性 急回特性
急回特性 急回特性 急回特性 急回特性 急回特性
急回特性 急回特性
急回特性 急回特性
急回特性 急回特性
急回特性當曲柄以等角速度順時針轉過時,搖桿將由位置擺到,其擺角為,設所需時間為,C點的平均速度為;當曲柄繼續轉過時,搖桿又從位置回到,擺角任然是,設所需時間為,C點的平均速度為。由於曲柄為等角速度轉動,而,所以有。搖桿這種性質的運動稱為急回運動(quick-return motion) 。
衡量參數
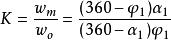
為了表明急回運動的急回程度,可用行程速度變化係數或行程速比係數(coefficient of travel speed variation)K來衡量,即
 急回特性 急回特性 急回特性
急回特性 急回特性 急回特性上式表明,當機構存在極位夾角 時,機構便具有急回運動特性, 角越大,K值越大,機構的急回運動性質也越顯著 。
 雙曲柄機構急轉變速特性
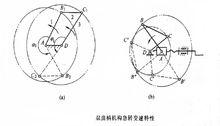
雙曲柄機構急轉變速特性一般雙曲柄機構的行程速比變化係數K可如下求得:如右圖a所示:
 急回特性
急回特性 急回特性
急回特性 急回特性
急回特性 急回特性
急回特性 急回特性
急回特性 急回特性
急回特性 急回特性
急回特性 急回特性
急回特性 急回特性
急回特性設曲柄AB為原動件,做勻速轉動,在連桿BC與機架AD平行的兩位置,兩曲柄的角速度相等,即。當主動曲柄由位置逆時針轉至位置時,主動曲柄轉過,從動曲柄轉過。在此區間,,設其平均值為;而在其餘區間,,設其平均值為,故雙曲柄機構的行程速度變化係數K為
 急回特性
急回特性 急回特性
急回特性由上式可知,比值越大,K值也就越大,故一般雙曲柄機構可有很大的行程速度變化係數K,並可用改變機架長度等方法來改變行程速度變化係數,故常用作可調變速轉動機構(如右圖 b)。
工程套用
 收割機刀片機構
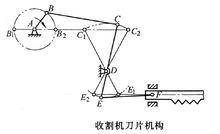
收割機刀片機構機構急回運動特性在工程上的套用有三種情況:第一種情況是工作行程要求慢速前進,以利於切削、衝壓等工作的進行,而回程時為節省空回時間,則要求快速返回,如牛頭刨床、插床等就是如此,這是常見的情況。第二種情況是對某些顎式破碎機,要求其動鄂快進慢退,使已被破壞的礦石能及時推出鄂板,避免礦石的過粉碎(因破碎後的礦石有一定的粒度要求)。第三種情況是一些設備在正、反行程中均在工作,故無急回要求,如右圖所示的收割機中的割刀片的運動 。某些機載搜尋雷達的搖頭機構也是如此。
急回機構的急回方向與原動件的迴轉方向有關,為避免把急回方向弄錯,在有急回要求的設備上應明顯標誌出原動件的正確迴轉方向。
急回特性 急回特性
急回特性對於有急回運動要求的機械,在設計時,應先確定行程速度變化係數K,求出 角後,再設計各桿的尺寸,其中 。
