
導航計算機的提出
導航計算機主要工作包括:採集IMU信號,並通過解算,得到慣導系統的位置、速度和姿態角信號;採集GPS系統的位置和速度信號;對慣導系統和GPS系統各自提供的導航信息進行組合導航解算,利用兩個系統的各自優勢,得到更高精度的導航結果。
導航運算一般涉及捷聯慣性導航解算和組合導航運算,而這兩種算法都比較繁複耗時:首先由於精度要求高,導航運算要求是浮點運算;其次,運算過程中,需要進行多次疊代運算,包括微分方程的求解疊代,等效轉動矢量的求解疊代等;最後,為了抑制慣性導航的誤差隨著時間累積而採用GPS去校正慣導信息,一般會採用卡爾曼濾波運算,運算過程中,系統狀態方程的維數高、矩陣的加法、乘法以及求逆運算繁多。這些都要求導航計算機的運算能力足夠強大,在精度和速度上能夠滿足需求。
導航計算機還需要進行慣導和GPS信號的數據採集和導航結果輸出,對於數據採集和數據通信任務,如果直接用CPU來實現,將會產生以下兩個不利因素:一是接口數量和靈活性受到限制,一般來說,CPU的片上外設數量和種類有限,而導航計算機接收的數據來源卻是多種多樣的,比如GPS、加速度計信息、陀螺信號、溫度、氣壓等,同時導航結果也需要輸出到其他設備,比如顯示終端、火控設備、數據記錄儀等,普通的CPU幾乎不能滿足要求;二是CPU的導航運算速度受到影響對多個外設的控制以及和不同外設之間的通訊,都會占用CPU的寶貴時間,使其不能專注於導航解算。這就需要導航計算機將數據的採集,傳輸以及控制任務和導航運算分離開來,以更好的提高其性能。
另外,對於運載體來說,完成導航的同時,導航系統應該儘可能減少其本身帶來的額外影響和負擔,尤其是那些對重量、體積、溫度和功耗敏感的運載體。這就要求導航計算機向小型化和低功耗的方向不斷發展,體現在設計上就是需要對元器件的集成度和工作功耗等方面進行合理的選擇。
總的來說,導航計算機平台要具有以下幾個特殊性:一是要求運算能力強,能夠高精度,實時處理大量的導航解算工作;二是要求接口多,控制能力強,能夠滿足與衛星,慣導等測量單元以及各種用戶設備之間的傳輸通信;三是要求集成度高,功耗低,能夠減少對載體的重量和能耗等方面的影響。
國內外導航計算機研究發展概況
導航計算機從最初的採用個人計算機體系結構到現在的專門為其設計的計算機平台,經歷了從低級到高級的發展歷程,國內外的大學和科研院所對它的研究也越來越多。下面選取了幾種具有典型代表性的導航計算機設計,通過對它們的分析來簡要介紹國內外導航計算機的研究發展概況:
基於PC/104的導航計算機
PC/104是一種匯流排標準,它於1992年,在IEEE進行PC標準擴展工作時,作為一種縮小尺寸而適應於嵌入式控制的PC標準被採納。相比個人PC機系統,PC/104組件在體積、功耗、可靠性和接口靈活性上有著顯著的優勢。90年代至今,它一直廣泛套用於導航計算機的設計。
哈爾濱工程大學提出了一種基於PC/104的慣導計算機設計,該設計將高性能嵌入式PC/104晶片(Core-Module 410)作為計算機的CPU,並且使用了Altera公司的EPM7128STC 100-7型CPLD進行外圍控制,一定程度上滿足了導航計算機小體積,高性能的要求。
基於DSP+單片機的導航計算機
DSP的全稱是數位訊號處理器,它專門適應於快速數位訊號處理,具有特殊的硬體和軟體結構。它的出現,大大帶動了導航計算機的發展。目前,計算機以DSP作為核心,輔以其他外設來完成導航功能已經成為一種流行趨勢。
南京航空航天大學提出了一種基於DSP+單片機的主從式雙CPU導航系統,該系統選用TI公司TMS320C5416型DSP晶片作為主處理器,選用Cygnal公司的C805S1F020MCU作為從處理器,最終的性能和精度與通用的PC機搭建的系統相當,雙CPU的設計在一定程度上保證了系統的接口和運算能力。
基於DSP+FPGA的導航計算機
FPGA是隨著微電子設計技術和工藝的發展而產生的一種現場可程式邏輯門陣列,它能夠根據需要,隨時對積體電路設計進行重新改版,在流片生產之前就能驗證方案,具有極大的靈活性。它的出現使得硬體電路的擴展和升級變得更加容易。另外,FPGA的高度集成大大減少了元器件占用的電路面積,擴充接口和增加控制單元只需FPGA內部資源滿足即可,不再會有新增元器件和擴大計算機體積的額外負擔。這種特點恰好符合導航計算機的多接口,多流程控制以及小型化的需求,所以可以用它來替代導航計算機中的外設通信和控制單元,分擔導航運算中的數據傳輸和流程控制任務,這樣能使導航計算機的體積指標和整體性能得到較大的提高。
印度理工學院於2005年2月提出了一款基於FPGA和DSP(TI公司TMS320vc33)的GPS/INS組合導航系統。該系統中,FPGA內部擴展了一路RS-232串口來接收GPS信號,並通過在其內部建立DPRAM ( Dual Port RandomAxis Memory)來存儲GPS數據,然後傳輸給DSP,導航計算機因FPGA的使用節省了一塊GPS接收電路板。最後實驗結果中,連續定位精度和GPS定位精度持平。導航計算機基本滿足了小型化和高精度的要求。
組合導航系統對導航計算機的現實需求
數據採集和通信接口需求
 導航計算機
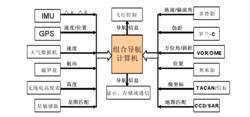
導航計算機以慣性導航為主,輔以其它導航信息源的組合導航是現代導航系統的主要實現形式。可與慣性系統組合的其他導航信息源種類眾多,它們各有優點,提供不同的導航物理量來輔助慣性系統。如圖是一個多信息源組合導航系統的組成框圖,慣性感測器IMU提供加速度和角速率,GPS提供位置和速度信息,空速表、磁羅盤和高度表是常見的機載儀表,它們分別給出載體速度、航向和高度信息,都卜勒測速和遠近程無線電測量一直都是航空導航的重要信息源,天文導航和圖像匹配導航近年來受到越來越多的關注。導航系統接收更多的導航信息源,可以增加組合選擇度,從而提高系統可靠性,通過選擇最可信的信息源,有可能獲得更高的精度。多信息源組合導航系統需要導航計算機具備相當數量和類型的外設接口。
圖中的導航信息源中,有的感測器設備輸出信號是模擬形式的電壓,有的則是RS-232等數字傳輸標準。為方便組合導航系統的測試,組合導航結果的存儲和傳輸,在導航計算機上設計USB和乙太網接口具有重要意義。
數據處理能力需求
導航計算機需進行的導航數據處理任務主要有捷聯慣性導航、卡爾曼導航數據處理中涉及大量的矩陣運算,其特點是浮點運算密集、運算導航計算機的數據處理機制應具備一個高性能處理器,從導航工程實踐的經驗可知,該處理器字長應不小於32位,其主頻不應小於200MHz;為適應導航運算浮點密集的特性,導航計算機需具有一個可以以硬體方式處理浮點運算的單元。
存儲容量的要求
導航信息源的增加、新型數據融合算法的使用以及為提高運行可靠性而設計的異常處理等,促使導航應用程式的規模不斷增大。而存儲技術的發展使數據存儲密度迅速提高,為嵌入式系統擴大存儲器規模提供了條件。因此,非易失程式存儲器的存儲容量應大於4MB,導航程式運行所在的動態存儲器空間應大於16MB。
