
簡介
導引頭伺服系統是指捕捉和跟蹤目標並給出制導信號的電子,機械伺驅系統。又稱導引頭位標器。
驅動裝置
經常採用的驅動裝置是電機和液壓馬達,它適用於飛彈雷達天線,紅外、雷射導引頭敏感器和電視攝像頭 。
任務
它完成的任務有兩個,一是在空間搜尋、捕捉和自動跟蹤目標;二是給出輸出控制信號。如在廣泛使用的比例導引中,要求測量以慣性空間為基準的視線旋轉角速度q,為了得到q的精確鍘量值,必須隔離彈體姿態角速度的有害干擾,實現輸出控制信號與q成比例的控制功能。
過程
一般採用陀螺穩定系統隔離彈體擾動,把天線或其他形式的敏感器,角速度陀螺感測器放置在萬向支架上,並通過電子線路和伺服機構驅動萬向支架旋轉,一直到誤差為零,彈體姿態變化產生的擾動角速度被抵消為止。陀螺穩定迴路如方框圖1虛線部分所示 。
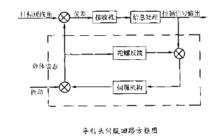 圖1
圖1