
簡介
根據中國物聯網校企聯盟的定義,通過定位系統獲取位置信息是物聯化時代的重要研究課題。物聯網環境下對定位技術的挑戰主要體現在:異構網路、多變環境下的精準定位;大規模套用;基於位置的服務(Location based Services);位置信息帶來的信息安全和隱私保護問題。
| 發射日期 | 運載火箭 | 火箭飛行次數 | 衛星編號 | 衛星類型 | 發射地點 |
| 2000年10月31日 | | | 北斗-1A | 北斗一號 | 西昌衛星發射中心 |
| 2000年12月21日 | | | 北斗-1B | ||
| 2003年5月25日 | | | 北斗-1C | ||
| 2007年2月3日 | | | 北斗-1D | ||
| 2007年4月14日04時11分 | 長征三號甲 | | 第一顆北斗導航衛星(M1) | 北斗二號 | |
| 2009年4月15日 | 長征三號丙 | | 第二顆北斗導航衛星(G2) | ||
| 2010年1月17日 | | 第三顆北斗導航衛星(G1) | |||
| 2010年6月2日夜間 | | 第四顆北斗導航衛星(G3) | |||
| 2010年8月1日05時30分 | 長征三號甲 | 第126次 | 第五顆北斗導航衛星(I1) | ||
| 2010年11月1日00時26分 | 長征三號丙 | 第133次 | 第六顆北斗導航衛星(G4) | ||
| 2010年12月18日04時20分 | 長征三號甲 | 第136次 | 第七顆北斗導航衛星(I2) | ||
| 2011年4月10日04時47分 | 第137次 | 第八顆北斗導航衛星(I3) | |||
| 2011年7月27日05時44分 | | 第九顆北斗導航衛星(I4) | |||
| 2011年12月2日05時07分 | | 第十顆北斗導航衛星(I5) | |||
| 2012年2月25日凌晨0時12分 | 長征三號丙 | | 第十一顆 北斗導航衛星 | ||
| 2012年4月30日4時50分 | 長征三號乙 | | 第十二、第十三顆 北斗導航系統 組網衛星(“一箭雙星”) | ||
| 2012年9月19日3時10分 | 長征三號乙 | | 第十四、十五顆北斗導航系統組網衛星“一箭雙星”) | ||
| 2012年10月25日23時33分 | 長征三號丙 | 第170次 | 第十六顆北斗導航衛星 |
歷史發展
全球定位系統(GPS)是20世紀70年代由美國陸海空三軍聯合研製的新一代空間衛星導航定位系統 。其主要目的是為陸、海、空三大領域提供實時、 全天候和全球性的導航服務,並用於情報收集、核爆監 衛星定位工作原理
測和應急通訊等一些軍事目的,是美國獨霸全球戰略的重要組成。經過20餘年的研究實驗,耗資300億美元,到1994年3月,全球復蓋率高達98%的24顆GPS衛星星座己布設完成。
系統組成
GPS全球衛星定位系統由三部分組成:空間部分———GPS星座;地面控制部分———地面監控系統;用戶設備部分———GPS 信號接收機。
GPS定位技術具有高精度、高效率和低成本的優點,使其在各類大地測量控制網的加強改造和建立以及在公路工程測量和大型構造物的變形測量中得到了較為廣泛的套用。GPS導航儀簡單地說,GPS導航儀就是能夠幫助用戶準確定位當前位置,並且根據既定的目的地計算行程,通過地圖顯示和語音提示兩種方式引導用戶行至目的地的汽車駕駛輔助設備。
它包括兩個重要的組成部分:一是全球定位系統(Global Positioning System)簡稱GPS。它是由空間衛星、地面監控和用戶接收等三大部分組成。在太空中有24顆衛星組成一個分布網路,分別分布在6條離地面2萬公里、傾斜角為55°的地球準同步軌道上,每條軌道上有4顆衛星。GPS衛星每隔12小時繞地球一周,使地球上任一地點能夠同時接收7~9顆衛星的信號。地面共有1個主控站和5個監控站負責對衛星的監視、遙測、跟蹤和控制。它們負責對每顆衛星進行觀測,並向主控站提供觀測數據。主控站收到數據後,計算出每顆衛星在每一時刻的精確位置,並通過3個注入站將它傳送到衛星上去,衛星再將這些數據通過無線電波向地面發射至用戶接收端設備。
註:這個系統最初是由美國陸海空三軍於20世紀70年代聯合研製的,它的主要目的是為陸、海、空三大領域提供實時、 全天候和全球性的導航服務,用於情報收集、核爆監測和應急通訊等一些軍事目的,是美國獨霸全球戰略的重要部署。GPS系統歷經20餘年的研究實驗,耗資300億美元,直到1994年3月全球復蓋率高達98%的24顆GPS衛星星座才正式布設完成。
二是汽車導航系統。光有GPS系統還不夠,它只能夠接收GPS衛星傳送的數據,計算出用戶的三維位置、方向以及運動速度和時間方面的信息,沒有路徑計算能力。用戶手中的GPS接收設備要想實現路線導航功能還需要一套完善的包含硬體設備、電子地圖、導航軟體在內的汽車導航系統。
GPS導航儀硬體包括晶片、天線、處理器、記憶體、螢幕、按鍵、揚聲器等組成部分。但就情況看來,市場中的GPS汽車導航儀在硬體上的差距並不大,主要區別還是集中在內置的軟體和地圖上。在這裡需要提醒大家注意一點,人們習慣上總是關心導航儀內預裝何種地圖,實際上這是混淆了地圖和軟體兩者的區別。所謂地圖其實只是數據,而軟體是搜尋引擎。地圖中各種地理信息綜合在一起的龐大數據如何被用戶所套用?如何才能反應到導航界面中?這就要藉助於軟體來實現了。因此導航地圖離不開軟體的支持,反過來再優秀的軟體系統如果沒有詳細的地圖數據也是白搭。
總結一下,一部完整的GPS汽車導航儀是由晶片、天線、處理器、記憶體、顯示屏、揚聲器、按鍵、擴展功能插槽、電子地圖、導航軟體10個主要部分組成。
判斷GPS導航儀的優劣,導航儀所能接收到的GPS衛星數量和路徑規劃能力是關鍵。導航儀所能接收到的有效衛星數量越多,說明它當前的信號越強,導航工作的狀態也就越穩定。如果一台導航儀經常搜尋不到衛星或者在導航過程中頻繁地中斷信號影響了正常的導航工作,那它首先質量就不過關更談不上優劣了。
常用術語
(這裡解釋全球定位系統已經太多了,我就不囉嗦了,把它設成超級連結,想看就點擊吧)
1.坐標(Cordinate)
有二維和三維兩種表示。
2.路標(Landmark or waypoint)
GPS記憶體的一個坐標值。
3.路線(Route)
路線是GPS記憶體中存儲的一組數據,包括一個起點和一個終點的坐標,還可以包括若干中間點的坐標,每兩個坐標之間的線段叫一條腿。
4.前進方向(Heading)
GPS沒有指北針的功能,靜止不動時是不知道方向的。
5.導向(Bearing)
6.日出日落時間(Sun set/raise time)
7.足跡線(Plot trail)
原理
 定位系統
定位系統GPS導航系統的基本原理是測量出已知位置的衛星到用戶接收機之間的距離,然后綜合多顆衛星的數據就可知道接收機的具體位置。要達到這一目的,衛星的位置可以根據星載時鐘所記錄的時
間在衛星星曆中查出。而用戶到衛星的距離則通過紀錄衛星信號傳播到用戶所經歷的時間,再將其乘以光速得到(由於大氣層電離層的干擾,這一距離並不是用戶與衛星之間的真實距離,而是偽距(PR):當GPS衛星正常工作時,會不斷地用1和0二進制碼元組成的偽隨機碼(簡稱偽碼)發射導航電文。GPS系統使用的偽碼一共有兩種,分別是民用的C/A碼和軍用的P(Y)碼。C/A碼頻率1.023MHz,重複周期一毫秒,碼間距1微秒,相當於300m;P碼頻率10.23MHz,重複周期266.4天,碼間距0.1微秒,相當於30m。而Y碼是在P碼的基礎上形成的,保密性能更佳。導航電文包括衛星星曆、工作狀況、時鐘改正、電離層時延修正、大氣折射修正等信息。它是從衛星信號中解調製出來,以50b/s調製在載頻上發射的。導航電文每個主幀中包含5個子幀每幀長6s。前三幀各10個字碼;每三十秒重複一次,每小時更新一次。後兩幀共15000b。導航電文中的內容主要有遙測碼、轉換碼、第1、2、3數據塊,其中最重要的則為星曆數據。當用戶接受到導航電文時,提取出衛星時間並將其與自己的時鐘做對比便可得知衛星與用戶的距離,再利用導航電文中的衛星星曆數據推算出衛星發射電文時所處位置,用戶在WGS-84大地坐標系中的位置速度等信息便可得知。
可見GPS導航系統衛星部分的作用就是不斷地發射導航電文。然而,由於用戶接受機使用的時鐘與衛星星載時鐘不可能總是同步,所以除了用戶的三維坐標x、y、z外,還要引進一個Δt即衛星與接收機之間的時間差作為未知數,然後用4個方程將這4個未知數解出來。所以如果想知道接收機所處的位置,至少要能接收到4個衛星的信號。
GPS接收機可接收到可用於授時的準確至納秒級的時間信息;用於預報未來幾個月內衛星所處概略位置的預報星曆;用於計算定位時所需衛星坐標的廣播星曆,精度為幾米至幾十米(各個衛星不同,隨時變化);以及GPS系統信息,如衛星狀況等。
GPS接收機對碼的量測就可得到衛星到接收機的距離,由於含有接收機衛星鐘的誤差及大氣傳播誤差,故稱為偽距。對0A碼測得的偽距稱為UA碼偽距,精度約為20米左右,對P碼測得的偽距稱為P碼偽距,精度約為2米左右。
GPS接收機對收到的衛星信號,進行解碼或採用其它技術,將調製在載波上的信息去掉後,就可以恢復載波。嚴格而言,載波相位應被稱為載波拍頻相位,它是收到的受都卜勒頻 移影響的衛星信號載波相位與接收機本機振蕩產生信號相位之差。一般在接收機鍾確定的曆元時刻量測,保持對衛星信號的跟蹤,就可記錄下相位的變化值,但開始觀測時的接收機和衛星振盪器的相位初值是不知道的,起始曆元的相位整數也是不知道的,即整周模糊度,只能在數據處理中作為參數解算。相位觀測值的精度高至毫米,但前提是解出整周模糊度,因此只有在相對定位、並有一段連續觀測值時才能使用相位觀測值,而要達到優於米級的定位 精度也只能採用相位觀測值。
按定位方式,GPS定位分為單點定位和相對定位(差分定位)。單點定位就是根據一台接收機的觀測數據來確定接收機位置的方式,它只能採用偽距觀測量,可用於車船等的概略導航定位。相對定位(差分定位)是根據兩台以上接收機的觀測數據來確定觀測點之間的相對位置的方法,它既可採用偽距觀測量也可採用相位觀測量,大地測量或工程測量均應採用相位觀測值進行相對定位。
在GPS觀測量中包含了衛星和接收機的鐘差、大氣傳播延遲、多路徑效應等誤差,在定位計算時還要受到衛星廣播星曆誤差的影響,在進行相對定位時大部分公共誤差被抵消或削弱,因此定位精度將大大提高,雙頻接收機可以根據兩個頻率的觀測量抵消大氣中電離層誤差的主要部分,在精度要求高,接收機間距離較遠時(大氣有明顯差別),應選用雙頻接收機。
相對論為GPS提供了所需的修正
全球定位系統GPS衛星的定時信號提供緯度、經度和高度的信息,精確的距離測量需要精確的時鐘。因此精確的GPS接受器就要用到相對論效應。
準確度在30米之內的GPS接受器就意味著它已經利用了相對論效應。華盛頓大學的物理學家Clifford M. Will詳細解釋說:“如果不考慮相對論效應,衛星上的時鐘就和地球的時鐘不同步。”相對論認為快速移動物體隨時間的流逝比靜止的要慢。Will計算出,每個GPS衛星每小時跨過大約1.4萬千米的路程,這意味著它的星載原子鐘每天要比地球上的鐘慢7微秒。
而引力對時間施加了更大的相對論效應。大約2萬千米的高空,GPS衛星經受到的引力拉力大約相當於地面上的四分之一。結果就是星載時鐘每天快45微秒, GPS要計入共38微秒的偏差。Ashby解釋說:“如果衛星上沒有頻率補償,每天將會增大11千米的誤差。”(這種效應實事上更為複雜,因為衛星沿著一個偏心軌道,有時離地球較近,有時又離得較遠。)
GPS前景
由於GPS技術所具有的全天候、高精度和自動測量的特點,作為先進的測量手段和新的生產力,已經融入了國民經濟建設、國防建設和社會發展的各個套用領域。
隨著冷戰結束和全球經濟的蓬勃發展,美國政府宣布2000年至2006年期間,在保證美國國家安全不受威脅的前提下,取消SA政策,GPS民用信號精度在全球範圍內得到改善,利用C/A碼進行單點定位的精度由100米提高到20米,這將進一步推動GPS技術的套用,提高生產力、作業效率、科學水平以及人們的生活質量,刺激GPS市場的增長。據有關專家預測,在美國,單單是汽車GPS導航系統,2000年後的市場將達到30億美元,而在我國,汽車導航的市場也將達到50億元人民幣。可見,GPS技術市場的套用前景非常可觀。
功用
全球定位系統的主要用途:(1)陸地套用,主要包括車輛導航、應急反應、大氣物理觀測、地球物理資源勘探、工程測量、變形監測、地殼運動監測、 市政規劃控制等;(2)海洋套用,包括遠洋船最佳航程航線測定、船隻實時調度與導航、海洋救援、海洋探寶、水文地質測量以及海洋平台定位、海平面升降監測等;(3)航空航天套用,包括飛機導航、航空遙 感姿態控制、低軌衛星定軌、飛彈制導、航空救援和載人太空飛行器防護探測等。
套用
主要是為船舶,汽車,飛機等運動物體進行定位導航。例如:
船舶遠洋導航和進港引水
飛機航路引導和進場降落
汽車自主導航
地面車輛跟蹤和城市智慧型交通管理
緊急救生
個人旅遊及野外探險
個人通訊終端(與手機,PDA,電子地圖等集成一體)
電力,郵電,通訊等網路的時間同步
準確時間的授入
準確頻率的授入
各種等級的大地測量,控制測量
道路和各種線路放樣
水下地形測量
地殼形變測量,大壩和大型建築物變形監測
GIS套用
工程機械(輪胎吊,推土機等)控制
精細農業
◆GPS在道路工程中的套用
GPS在道路工程中的套用,主要是用於建立各種道路工程控制網及測定航測外控點等。隨著高等級公路的迅速發展,對勘測技術提出了更高的要求,由於線路長,已知點少,因此,用常規測量手段不僅布網困難,而且難以滿足高精度的要求。如今,國內已逐步採用GPS技術建立線路首級高精度控制網,然後用常規方法布設導線加密。實踐證明,在幾十公里範圍內的點位誤差只有2厘米左右,達到了常規方法難以實現的精度,同時也大大提前了工期。GPS技術也同樣套用於特大橋樑的控制測量中。由於無需通視,可構成較強的網形,提高點位精度,同時對檢測常規測量的支點也非常有效。GPS技術在隧道測量中也具有廣泛的套用前景,GPS測量無需通視,減少了常規方法的中間環節,因此,速度快、精度高,具有明顯的經濟和社會效益。
◆GPS在汽車導航和交通管理中的套用
三維導航是GPS的首要功能,飛機、輪船、地面車輛以及步行者都可以利用GPS導航器進行導航。汽車導航系統是在全球定位系統GPS基礎上發展起來的一門新型技術。汽車導航系統由GPS導航、自律導航、微處理機、車速感測器、陀螺感測器、CD-ROM驅動器、LCD顯示器組成。GPS導航系統與電子地圖、無線電通信網路、計算機車輛管理信息系統相結合,可以實現車輛跟蹤和交通管理等許多功能。
GPS技術在導航儀中的套用舉例
國際領先GPS導航儀品牌:Ahada(艾航達)――源自美國矽谷,現已登錄中國!
Ahada(艾航達)――專注於發展先進的GPS衛星導航攜帶型設備供應商,公司產品線涉及攜帶型導航、GPS手機導航及個人手持導航裝置等全系列GPS便攜產品。
Ahada(艾航達)――在美國矽谷、中國分別成立研發、生產、銷售的機構,匯集多位在GPS、通訊領域擁有多年經驗的國際化一流科技精英,實現Ahada的領先技術和卓越品質。
國內上線首款產品:Ahada N310――高性價比機王(為商務精英和白領女性量身定做的GPS導航儀機型)
產品核心功能
地圖查詢
◎可以在操作終端上搜尋你要去的目的地位置。
◎可以記錄你常要去的地方的位置信息,並保留下來,也和可以和別人共享這些位置信息。
◎模糊的查詢你附屬檔案或某個位置附近的如加油站,賓館、取款機等信息,
路線規劃
◎GPS 導航系統會根據你設定的起始點和目的地,自動規劃一條線路。
◎規劃線路可以設定是否要經過某些途徑點。
◎規劃線路可以設定是否避開高速等功能。
自動導航
◎語音導航:
用語音提前向駕駛者提供路口轉向,導航系統狀況等行車信息,就像一個懂路的嚮導告訴你如何駕車去目的地一樣。導航中最重要的一個功能,使你無需觀看操作終端,通過語音提示就可以安全到達目的地。
◎畫面導航:
在操作終端上,會顯示地圖,以及車子現在的位置,行車速度,目的地的距離,規劃的路線提示,路口轉向提示的行車信息。
◎重新規劃線路:
當你沒有按規劃的線路行駛,或者走錯路口時候,GPS 導航系統會根據你現在的位置,為你重新規劃一條新的到達目的地的線路。
測地型GPS
測地型接收機主要用於精密大地測量和精密工程測量。這類儀器主要採用載波相位觀測值 進行相對定位,定位精度高。儀器結構複雜,價格較貴。根據使用用途和精度,又分為靜態(單頻)接收機和動態(雙頻)接收機即RTK.
目前,在GPS技術開發和實際套用方面,國際上較為知名的生產廠商有美國Trimble(天寶)導航公司、瑞士Leica Geosystems(徠卡測量系統)、日本TOPCON(拓普康)公司、美國Magellan(麥哲倫)公司(原泰雷茲導航)、國內有中海達、上海華測導航、南方測繪等。
Trimble(天寶)的GPS接收機產品主要有SPS751、SPS851、SPS781、SPS881、R8、R8GNSS、R7、R6及5800、5700等。其作為美國軍方控股企業,是世界上最早研究與生產的GPS的部分企業之一,其中,SPS881,R8GNSS為72通道GPS/WAAS/EGNOS接收機,它把三頻GPS接收機、GPS天線、UHF無線電和電源組合在一個袖珍單元中,具有內置Trimble Maxwell 5晶片的超跟蹤技術。即使在惡劣的電磁環境中,仍然能用小於2.5瓦的功率提供對衛星有效的追蹤。同時,為擴大作業復蓋範圍和全面減小誤差,可以同頻率多基準站的方式工作。此外,它還與Trimble VRS網路技術完全兼容,其內置的WAAS和EGNOS功能提供了無基準站的實時差分定位。SPS751、SPS851、SPS551還具有接收星站差分改正信息的功能,最高單機定位精度可達到5cm。
Leica Geosystems(徠卡測量系統)是全球著名的專業測量公司,其不僅在全站儀、相機方面對行業產生了很大的影響,而且在測量型GPS的研發及GPS的套用上也做出了極大的貢獻,是快速靜態、動態RTK技術的先驅。其GPS1200系統中的接收機包括4種型號:GX1230 GG/ATX1230 GG、GX1230/ATX1230、GX1220和GX1210。
其中,GX1230 GG/ATX1230 GG為72通道、雙頻RTK測量接收機,接收機集成電台、GSM、GPRS和CDMA模組,具有連續檢核(SmartCheck+)功能,可防水(水下1m)、防塵、防沙。動態精度:水平10mm+1ppm,垂直20mm+1ppm;靜態精度:水平5mm+0.5ppm,垂直10mm+0.5ppm。它在20Hz時的RTK距離能夠達到30km甚至更長,並且可保證厘米級的測量精度,基線在30公里時的可靠性是99.99%。
日本TOPCON(拓普康)公司生產的GPS接收機主要有GR-3、GB-1000、Hiper系列、Net-G3等。其中,GR-3大地測量型接收機可100%兼容三大衛星系統(GPS+GLONASS+GALIEO)的所有可用信號,他不僅僅是世界上最早研發出能同時接收美國的GPS與俄羅斯GLONASS兩種衛星信號的雙星技術的廠家,也是現今世界上唯一可以同時接收所有GNSS衛星的接收機技術,有72個超級跟蹤頻道,每個通道都可獨立追蹤三種衛星信號,採用抗2米摔落堅固設計,支持藍牙通訊,內置GSM/GPRS模組(可選)。靜態、快速靜態的精度:水平3mm+0.5ppm,垂直5mm+0.5ppm;RTK精度:水平10mm+1ppm,垂直15mm+1ppm;DGPS精度:優於25cm。值得一提的是,該款接收機於2007年2月在德國獲得了2007年度iF工業設計大獎,這款儀器的外觀打破了測量型GPS的常規模式,更具科學性與人性化設計。
中海達測繪的GPS接收機產品主要包括靜態一體化接收機HD-8200G和GD-8200X,其中HD-8200G配備有無線遙控器,可遠距離查看衛星狀況等關鍵信息,8200X配備有語音導航功能,可通過面板直接設定靜態採集關鍵參數衛星高度角和採樣間隔。RTK產品主要有珠峰HD-5800、V8 CORS RTK、V8 GNSS RTK。RTK作業精度:靜態後處理精度: 平面:±2.5mm+1ppm,高程:±5.0mm+1ppm,RTK定位精度: 平面:±1cm+1ppm,高程:±2cm+1ppm,碼差分定位精度:0.45m(CEP),單機定位精度:1.5m(CEP)。V8具有八大創新技術,
華測導航的GPS接收機產品主要有X60CORS、X20單頻接收機、X90一體化RTK、X60雙頻接收機等。國內通過中華人民共和國製造計量器具許可證獲得的精度最高的產品,其中,X90為28通道雙頻GPS接收機,集成雙頻GPS接收機、雙頻測量型GPS天線、UHF無線電、進口藍牙模組和電池,動態精度:水平10mm+1ppm,垂直20mm+1ppm;靜態精度:水平5mm+1ppm,垂直10mm+1ppm,能達到10-30公里的作用範圍(因實際地域情況有所差別),既可以承受從3米高度跌落到堅硬的地面,也可浸入水下1米深處進行測量。X90具有靜態、快速靜態、RTK、PPK、碼差分等多種測量模式,精度範圍為毫米級到亞米級。 而且可與天寶,徠卡等主流品牌聯合作業。
南方測繪的GPS接收機產品主要有RTK S82、S86、藍牙靜態GPS、等。其中S82採用一體化設計,集成GPS天線、UHF數據鏈、OEM主機板、藍牙通訊模組、鋰電池,其RTK定位精度:平面±(2cm+1ppm),垂直±(3cm+1ppm);靜態後處理精度:平面±(5mm+0.5ppm),垂直±(10mm+1ppm);單機定位精度:1.5m(CEP);碼差分定位精度:0.45m(CEP)。
車載GPS
當通過硬體和軟體做成GPS定位終端用於車輛定位的時候,稱為車載GPS,但光有定位還不行,還要把這個定位信息傳到報警中心或者車載GPS持有人那裡,我們稱為第三方。所以GPS定位系統中還包含了GSM網路通訊(手機通訊),通過GSM網路用簡訊的方式把衛星定位信息傳送到第三方。通過微機解讀簡訊電文,在電子地圖上顯示車輛位置。這樣就實現了車載GPS定位。 與此同時,在車上安裝相應的探測感測器,利用車載GPS定位的GSM網路通訊功能,同樣能把防盜報警信息傳送到第三方,或者把這個報警電話、簡訊直接傳送到車主手機上,完成車載GPS防盜報警。這裡可以看出,車載GPS定位的GSM網路部分實際上是一個智慧型手機,可以和第三方互相通訊,還可以把車輛被搶,司機被劫、被綁架等信息傳送到第三方。 所以說車載GPS定位是定位、防盜、防劫的。
目前市場銷售很廣闊,經常被大家提及的是一般的民用的導航gps,這樣的gps主要是給汽車定位,導航。目前越來越發達的道路,錯綜複雜的高架橋給駕駛者越來越難分辨道路。導航車載gps的確是給駕駛者帶來了極大的方便!
而且現在的導航gps還具有提前預警電子眼、查詢全國旅遊景點、酒店等服務。的確是旅遊帶來了極大的方便!
◆類似車載GPS
類似車載GPS終端的還有定位手機、個人定位器等。GPS衛星定位由於要通過第三方定位服務,所以要交納不等的月/年服務費。
目前所有的GPS定位終端,都沒有導航功能。因為再需要增加硬體和軟體,成本提高。
我們在電視裡看到的車載GPS廣告,和上述的車載GPS完全是兩回事。它是一種GPS導航產品,當需要導航時,首先定位,也就是導航的起點,這與真正的GPS定位是不同的,它不能把定位信息傳送到第三方和持有人那裡,因為導航儀中缺少手機功能。比如你把導航儀放在車裡,你朋友把車借開走了,導航儀不能發信息給你,那你就無法查找車輛位置。所以導航儀是不能定位的。
你說我買的是導航手機該行了吧,你想想,你把導航手機放在車上,現在車被盜了,那個手機會自己給你或第三方打電話發簡訊嗎?它是需要人來操作的。所以說目前的導航終端都沒有定位功能。
導航終端可以導航路線,讓你在陌生的地方不迷路,劃出路線讓你到達目的地,告訴你自己當前位置,和周邊的設施等等。
中國目前在GPS應該上取得了很大的市場.其中有很多公司是導航的.但是也有在GPS行業做定位管理的。
各種GPS/GIS/GSM/GPRS車輛監控系統軟體、GSM和GPRS移動智慧型車載終端、系統的二次開發車輛監控系統整體搭建方案.系統廣泛套用於公安,醫療,消防,交通,物流等領域。該方案基於NXP的PNX1090 Nexperia移動多媒體處理器硬體和由NXP與合作夥伴ALK Technologies聯合開發的軟體。NXP聲稱,該方案提供了設計師搭建一個帶導航能力的低成本、多媒體功能豐富的攜帶型媒體播放器所需的一切,這些多媒體功能包括:MP3播放、標準和高清晰度視頻播放和錄製、FM收音、圖像存儲和遊戲。NXP以其運行於PNX0190上的swGPS Personal軟體來實現GPS計算,從而取代了一個GPS基帶處理器,進而降低了材料清單(BOM)成本並支持現場升級。
跟隨GPS 的一系列關聯的套用都設計到數學和算法,和GIS系統,地圖投影,坐標系轉換!
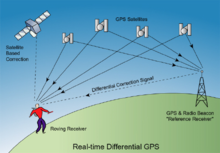
由於衛星運行軌道、衛星時鐘存在誤差,大氣對流層、電離層對信號的影響,以及人為的SA保護政策,使得民用GPS的定位精度只有100米。為提高定位精度,普遍採用差分GPS(DGPS)技術,建立基準站(差分台)進行GPS觀測,利用已知的基準站精確坐標,與觀測值進行比較,從而得出一修正數,並對外發布。接收機收到該修正數後,與自身的觀測值進行比較,消去大部分誤差,得到一個比較準確的位置。實驗表明,利用差分GPS(DGPS),定位精度可提高到5米。
GPS預警器
GPS預警器是通過GPS衛星在GPS預警器中設定坐標來完成的,比如遇到一個電子眼,然後通過相關設備在電子眼的正下方設立一個坐標,這樣,使得裝上這個坐標點數據的預警器到達這個點時,在達到坐標點的前300米左右就會開始預警,告訴車主前面有電子眼測速,不能超速駕駛,這樣就起到一個預警作用。這樣的準確率跟數據點的多少是有關係的,主要就是利用衛星的定位來實現了。
試機辨真假
記者通過汽車美容店的一朋友協助,挑選了4款所謂的“GPS預警機”,通過調研和試機對比,確認其中一款是冒牌GPS的“電子狗”。並得出以下結論:
A. GPS預警器:一個預警點報警一次,單向預警;定點報警,不受干擾;預警準確率可達98%以上。可選擇的音樂和語音種類多,音質較好。
B.假GPS預警器:同一個預警點報警兩次(駛向預警點和離開預警點都報警);會受某些公共設施如電塔干擾誤報警;多有漏報,準確性率低不足70%;報警音樂和語音單一,音質較差
GPStar智慧型GPS系統
主要由兩大部分組成,即:本地的監控中心軟體管理平台和遠程的GPS智慧型車載終端。遠程的GPS智慧型車載終端將車輛所處的位置信息、運行速度、運行軌跡等數據傳回到監控中心,監控中心接收到這些數據後,會立即進行分析、比對等處理,並將處理結果以正常信息或者報警信息兩類形式顯示給管理員,由管理員決定是否要對目標車輛採取必要措施。
GPS數據
卜默示條件,GPS模組SiRFStarIII接受每二輸出位置的數據,通常$GPRMC精簡數據格式的數據,包括緯度,經度的目的,速度(結),運動方向角,年,月,時,分,秒,毫秒,定位數據是有效的或無效的,和其他重要信息。語句格式如下:
$GPRMC,,,,,,,,,,,,*,HH
只需要知道位置信息,所以在閱讀唯一的,可以實際套用。
<1>:當地時間代表UTC。格式“當每分鐘,小時,分鐘和秒2。
<2>:工作代表國家。”“顯示可用的數據,“V”表示接受警報,沒有可用的數據。
<3>:代表緯度數據。“子級的格式。分分分。”
<4>:緯度半球為代表的“N”或“S”。
<5>:代表經度數據。格式和LD
現狀;度分鐘。sub-sub-sub-sub.”
<6>:代表經度半球,為“E”或“
軟體讀取經緯度數據,獲取用戶的位置後停止分析,確定用戶的具體位置在該地區建立和平。方法是基於用戶的設定確定中心的緯度和經度和緯度和經度計算出活動維持當前的對象可以超過和平活動預定半徑。結果的基礎上的歧視,設定相應的標誌。
