
相較區別
捷聯姿態計算中方向餘弦與四元數法比較
捷聯慣性姿態計算中,傳統觀點認為,方向餘弦法由於需要維護9個參數,而四元數法只需要4個參數,從而四元數法得到了廣泛應有,成為經典算法。但是從捷聯慣性導航與制導的整個過程看,方向餘弦矩陣是必不可少的,而四元數卻是中間變數。通過對方向餘弦與四元數姿態算法進行深入分析比較,並對2種算法進行仿真表明:這2種算法精度相當,且方向餘弦法具有容易使用、計算量小、編程方便等優點,因此完全可以替代四元數法。
內容介紹
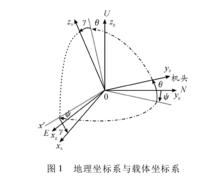 圖1
圖1慣導系統基本工作原理是以牛頓力學定律為基礎,通過測量載體在慣性參考系的加速度,將它對時間進行積分,之後將其變換到導航坐標系,得到在導航坐標系中的速度、偏航角和位置信息等。對捷聯慣導系統而言,首先要計算出載體坐標系至導航計算的地理坐標系坐標系之問的坐標轉換矩陣,即姿態矩陣或方向餘弦陣。直接安裝在載體上的慣性元件測得加速度和角加速度是沿載體軸的分量,將這些分量經過方向餘弦陣,可以轉換到要求的計算機坐標系內的分量。這個矩陣可以描述載體和地理坐標系之間的關係,有了這個轉換矩陣,導航計算機便可根據相應的力學方程解出要求的導航和姿態參數來。方向餘弦矩陣的原理如圖1所示。
 圖2
圖2載體的姿態角實際上就是載體坐標系OXYZ和地理坐標系OXYZ之間的方位關係,如圖1所示。b系相對於t系的角位置可以用一組歐拉角航向角H、俯仰角φ、橫滾角θ、來表示2個坐標系之間的變換關係,如圖2中公式。
由於方向餘弦矩陣C 的元素可以單值地確定艦船的姿態角,故矩陣C常常稱為姿態矩陣,也稱為捷聯矩陣。
顯然,姿態矩陣C中的元素是載體的航向角H、俯仰角φ、橫滾角θ的函式。若知道了它們的元素,則可以單值地計算出H、φ 、θ的大小。以方向餘弦矩陣為核心的,捷聯慣性系統姿態更新算法主要有方向餘弦法和四元數法。
方向餘弦法
方向餘弦法是用矢量的方向餘弦來表示姿態矩陣的方法,也就是繞定點轉動的2個坐標系之間的關係可以用方向餘弦矩陣來表示。方向餘弦矩陣是隨時間變化的,其變換規律用的數學微分方程來描述,即時值就可以通過求解該微分方程得到。
四元數
四元數理論是數學中的古老分支,是由哈密爾頓於1943年首先提出的,四元數具有很強的物理意義,它可以表征剛體姿態變換時順時歐拉軸和所需的轉角。但是該理論建立之後長期沒有得到實際套用,70年代以來,隨著數字計算機和計算技術、空間技術、特別是捷聯式慣性導航技術的發展,四元數算法在捷聯式慣性系統、剛體姿態控制、定位和穩定控制中得到了廣泛套用。尤其是在捷聯慣性系統姿態計算領域,已經成為經典的算法。
比較
對於這2種算法,通常觀點認為,方向餘弦法姿態矩陣具有9個元素,所以解算矩陣微分方程時,實際是解算9個聯合微分方程,一般來說計算工作量比較大,實時計算困難,工程上不太實用。而四元數法與方向餘弦法比較,計算量小,存儲容量少,僅需要進行簡單的四元數規範化處理便可以保證姿態矩陣的正交性,因而成為一種普遍採用的方法。
然而,通常所統計的計算量,僅僅是根據姿態更新算法本身得到的,沒有綜合考慮完整的姿態計算過程以及整個捷聯計算任務( 包括測量的比力矢量求解) ; 而且姿態算法的最終選擇不能夠僅僅依據參數的多少來進行確定。
結論
通過相關仿真及分析比較可以看出,在導航、制導等慣性運算中方向餘弦矩陣是必需的,對於方向餘弦矩陣的運算,可用採用直接運算的方向餘弦法,也可以採用廣泛使用的四元數算法,四元數法首先需要對四元數進行初始化,定義從導航坐標繫到飛行器體坐標系的四元數,然後根據採樣的值,對四元數方程進行更新,還需要根據實時確定的四元數求出四元數相應的方向餘弦矩陣,進而求解出載體姿態。從四元數運算過程來看,四元數實質上是姿態運算中的一個中介運算載體,是一個中間變數。而方向餘弦算法則直接以方向餘弦矩陣作為核心變數,根據採樣值直接對該矩陣進行更新運行。因此,方向餘弦算法在慣性運算表達上更直接,也更容易理解。
仿真分析表明,方向餘弦算法的運算精度與四元數法相當,且誤差趨勢一致,表明兩者對剛體鏇轉的表示是一致的;在實際套用方面,方向餘弦算法具有使用方便、計算量小,且編程容易的特點。雖然傳統觀點認為,方向餘弦算法需要維護9個參數,而四元數只有4個參數,但是考慮到後續運算對方向餘弦矩陣的需求,四元數還是需要轉換為姿態矩陣的。隨著計算機技術的發展,兩者的區別就變得越來越模糊了。
