
概念
基-高比是指傳統攝影測量在影像解析度給定的前提下,為獲得儘可能高的高程精度,基本上都採用大基高比(0.6~1)的方案,以實現地形三維信息的可靠高精度的提取。在影像獲取系統嚴格標定和影像匹配精度較高的情況下,小基高比攝影測量同樣可以重建可靠的三維信息。
小基高比攝影測量方法及實驗分析
研究背景
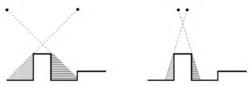 圖1 大小基高比立體成像盲區比較
圖1 大小基高比立體成像盲區比較 圖2 5張航空影像
圖2 5張航空影像傳統攝影測量在建築物密集、高度起伏變化較大的城市地區測繪中容易造成較大的輻射和幾何差異(畸變、遮擋、運動目標影響等),使得相關匹配處理起來非常困難,導致獲取高精度、大比例尺地形三維信息的自動化程度相對較低,難以滿足快速獲取的需求。採用小基高比立體觀測模式,可以很好地避免上述不利因素,特別是在城市大比例尺立體測繪中有更多的優勢,可克服大基高比攝影測量在城市測繪中遮擋多、“死區”多、數據獲取效率低的缺陷,如圖1所示,為高效率獲取城市地區DSM/DEM提供了新的手段與方法,為高精度影像處理提供了輻射特性較為一致、幾何變形小的立體影像數據源,為大幅提高自動化處理效率奠定基礎。然而,隨著基高比的降低,也必然會帶來交會精度的降低,需要研究高精度的影像匹配算法予以彌補。
 表1 影像外方位元素
表1 影像外方位元素在小基高比攝影測量的研究上,法國人走在前列,Neus Sabater等人研究了小基高比攝影測量的有關理論與方法,開發出MARC、MARC2等適用於小基高比影像的高精度匹配算法,用航空平台對小基高比攝影測量技術進行全面試驗,初步驗證該技術的可行性。
 圖3 不同基高比立體像對實驗流程
圖3 不同基高比立體像對實驗流程在國內,門朝光、邊繼龍等人從計算機視覺的角度研究了小基高比條件下的立體匹配算法,初步驗證其算法能達到較高的匹配精度,能夠彌補小基高比給高程信息帶來的損失。本文從理論和實驗的角度探討小基高比立體測量的可行性。通過分析發現,匹配誤差可以分為兩項,其中一項因噪聲產生且與基高比有關,另外一項只與影像匹配算法有關。由於小基高比條件下影像相關程度較高,影像匹配精度更高,可以通過設計高精度的影像匹配算法降低噪聲對匹配誤差造成的影響。
實驗與分析
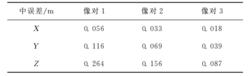 表2 實驗1統計結果
表2 實驗1統計結果為了驗證小基高比條件下立體像對能夠獲得高精度高程信息,本文實驗所用數據為5張連續具有一定重疊度的UCD航空遙感影像(為方便實驗,影像從大幅影像中截取),影像大小均為800像素×900像素,如圖2所示,解析度為0.05m,焦距f為101.4mm,像元大小為0.009mm,外方位元素如表1所示。影像1和影像2、影像3、影像4、影像5分別組成基高比為0.12、0.23、0.35、0.47的立體像對,從影像中可以看出隨著基高比的增大,幾何差異增大。
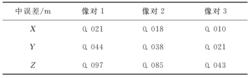 表3 實驗2統計結果
表3 實驗2統計結果實驗所用技術方案如圖3所示,對5張連續UCD高解析度航空影像分別進行特徵提取,將影像1和影像2、影像3、影像4、影像5組成的立體像對分別進行特徵匹配處理,然後查找4個匹配結果中左像點相同的點,進行最小二乘匹配和前方交會處理,並生成地麵點坐標檔案。
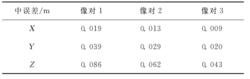 表4 實驗3統計結果
表4 實驗3統計結果實驗1:利用整像素級SIFT匹配結果進行前方交會。該實驗利用生成的82組整像素級SIFT特徵匹配結果進行前方交會處理。像對4基高比為0.47,比像對1、2和3的基高比大,可以認為其前方交會的結果最可靠,因此將其計算得到的地麵點坐標作為基準,分別計算像對1、像對2、像對3地麵點坐標在X,Y,Z3個方向上的中誤差,如表2所示。
實驗2:利用子像素級SIFT匹配結果進行前方交會(內插二次曲面精確確定特徵點的位置)。該實驗利用生成的82組子像素級匹配結果進行前方交會處理。將像對4計算得到的地麵點坐標作為基準,分別計算像對1、像對2、像對3地麵點坐標在X,Y,Z3個方向上的中誤差,如表3所示。
實驗3:對整像素級SIFT匹配結果經最小二乘匹配後前方交會。該實驗對實驗1中生成的整像素級匹配結果進行最小二乘匹配處理,然後進行前方交會。將像對4計算得到的地麵點坐標作為基準,分別計算像對1、像對2、像對3地麵點坐標在X,Y,Z3個方向上的中誤差,如表4所示。
從實驗1可以看出,影像匹配精度為整像素級時,基高比為0.12的立體像對的高程定位精度較差,約為5個GSD,對平面定位精度影響相對較小。隨著基高比的增加,像對2和像對3的高程定位精度和平面定位精度都得到有效提升,說明影像匹配精度較差時,小基高比立體像對不能獲得高精度的地面定位結果。
從實驗2和實驗3可以看出,影像匹配精度較高時,像對1、像對2、像對3的地面定位精度都得到大幅度提升,即使是基高比為0.12立體像對的高程定位精度也小於2個GSD。實驗3中像對1、像對2、像對3的地面定位精度較實驗2有輕微幅度的提升,說明最小二乘匹配的精度更高。因此,在小基高比條件下,高精度的影像匹配結果可以彌補交會精度的缺失,小基高比立體像對同樣可以獲得高精度的地形三維信息。
研究結論
1)研究從數學的角度探討小基高比條件下重建高程信息的可行性,並利用不同基高比的影像實驗,驗證在特徵明顯區域小基高比立體像對同樣可以獲取可靠的高精度的高程信息。
2)實驗採用特徵明顯的區域進行處理,取得較好的驗證結果。在小基高比條件下,對於特徵貧乏的區域,若想獲得可靠的高程精度,則需要研究新型的高精度影像匹配算法,進而有效提高其影像匹配精度和高程定位精度。
基於相位相關的小基高比影像匹配方法
研究背景
傳統的航空航天攝影測量在影像解析度一定的前提下,為獲得較高的高程精度,基本上都採用大基高比(0.6-1)的方案,以實現地形三維信息可靠、高精度地提取。但這種方案在建築物密集、高度起伏變化劇烈的城市地區測繪中,容易造成立體影像之間大的輻射和幾何差異(受遮擋、畸變、運動目標等因素影響),使得相關匹配處理異常困難。小基高比立體觀測模式可獲取地物目標近同時、交會角非常小的立體像對,該立體像對上相應像點附近存在很小的幾何差異和輻射差異,影像相關程度很高,可較好地解決傳統攝影測量在建築物密集、高度起伏變化劇烈的城市地區的匹配難題。然而,基高比的降低必然會帶來交會精度的降低。小基高比立體測量的相關研究表明,交會精度的損失可用高精度的視差測量精度進行彌補。因此,對於小基高比攝影測量而言,高精度的影像匹配顯得尤為重要。
為獲取亞像素級的影像匹配精度,一種典型的方法是:匹配前先通過插值法對圖像進行過採樣,然後再利用像素級影像匹配算法進行匹配。這種方法的匹配精度受限於過採樣頻率,還可能出現因為插值造成混淆現象;另外該方法會大大增加計算工作量。另一種典型的方法是利用相似度準則(如歸一化互相關)和經典區域匹配方法,通過在相關峰值附近擬合一條拋物線,在這個過程中內插出匹配像點的亞像素位置。然而從實踐來看,該方法的匹配精度不夠理想。主要探討了小基高比條件下兩種基於相位相關的亞像素級影像匹配方法,並通過實驗驗證了算法所能達到的精度級別。
基於局部上採樣的相位相關算法
相位相關法是建立在傅立葉變換平移性質上的。這種方法認為兩張相似影像在空間域內的平移,可以被表達為頻域中傅立葉變換式的線性相位差。假設所給的兩個影像函式之間的偏移量為a和b。一般情況下,解求(a,b)有兩種方法。
1)將頻率域互相關功率譜向兩個頻率軸投影,可以直接計算得到(a,b),但是這種方法對噪聲非常敏感;
2)依據傅立葉變換的平移性質,互相關功率譜的相位等於兩幅影像傅立葉變換式的線性相位差;將互相關功率譜進行逆傅立葉變換得到二維函式,根據函式極值所處的坐標位置可得到偏移量(a,b)。
這裡採用後一種方法求解。該算法採用零填充重採樣方法,對局部互相關功率譜進行上採樣處理。零填充是一種常用的信號重採樣方法,序列信號通過零內插處理,可以提升其傅立葉變換頻譜的解析度。
研究結論
在相位相關的基礎上,分別利用局部上採樣技術和奇異值分解技術,對小基高比立體影像進行處理,獲取了亞像素精度的匹配結果。在影像匹配過程中,匹配精度的高低與影像的相關性、影像信噪比、紋理豐富程度等因素有關。在影像相關性較差或者信噪比較低或者紋理信息較為匱乏時,無論採用哪種算法,都不會達到較高的匹配精度。在小基高比條件,影像拍攝時間間隔極短,幾何畸變和輻射畸變很小,影像的相關性較高,影像匹配精度也相應較高。當信噪比較低時,噪聲會淹沒影像匹配的精度,導致其匹配精度較低。為進一步提高影像匹配的精度,從而滿足小基高比攝影測量的需求,需更深入地研究影像匹配精度與信噪比、影像紋理信息等因素的量化關係,這是下一步的研究重點。
