
介紹
哺乳動物可以分為跖行動物、趾行動物和蹄行動物。跖行動物(也叫掌行動物)行走或奔跑時是整個腳掌著地的,如猿、熊等;而犬、狼、獵豹、獅、虎之類屬於趾行動物,以四肢的趾的末端兩節著地行走或奔跑;而蹄行動物則僅以趾端著地行走或奔跑,如馬、鹿等。以稍長距離的奔跑而論,跖行動物最慢,蹄行動物最快,而趾行動物居中。蹄行和趾行方式有利於提高奔跑的速度。
 不同關節結構
不同關節結構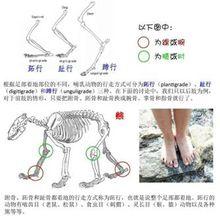 拓行趾行蹄行描述
拓行趾行蹄行描述拓行是最原始的行走方式,人類等脊椎動物的祖先登入時就是這樣的行動方式,現存的兩棲和爬行類動物也基本是拓行。拓行也是效率最低的的行走方式,從生物演進的結果來看,採用拓行方式進化的物種都不善於奔跑。
趾行相當於把拓行的腿加長了一段,大腿變短,肌肉集中在較高的位置,肌肉往復運動的距離相對變短,節約能量,因此是一種高效率的行走方式。人類奔跑時採用的是類似趾行的方式。
蹄行則更進一步的把“腿”加長,發力部位進一步上移,能量的使用效率更高。
分析: 從機械效率上講——蹄行 > 趾行 > 拓行
從靈活性上講———拓行 > 趾行 > 蹄行
蹄行、趾行下肢中主要的活動關節是由脛骨腓骨和拓骨結合而成踝關節,拓行下肢中的主要活動關節是由股骨和脛骨腓骨結合而成的膝關節。相比於人類進化出的拓行下肢結構中關節(膝關節)的運動方向,蹄行和趾行下肢結構中關節(踝關節)的運動方向相反,為反向關節運動方式,把形成這種運動方式的特殊結構稱為反向運動關節結構(特指在蹄行趾行下肢結構中由脛骨腓骨和拓骨結合而成的踝關節構造)。
值得注意的是,生物界存在類似反向運動關節結構的動物有很多,如昆蟲中螳螂的後足,鳥類的下肢等都是和人類行動時的關節運動方向相反的,其在構造上也與反向運動關節相同,所以在這裡指出,,方向關節運動結構是一個廣泛的生物學和機械設計學概念,其主要的意義是通過對生物生理結構的機械化模擬實現機械設計的創新。通俗的把與人體前進時下肢膝關節活動方向相反的關節構造稱為反關節結構。
定義
以人體前進時膝關節的活動方向為參照,與之活動方向相反的關節結構稱之為反向運動關節結構
套用
仿生機器人領域:實例有BostonDynamics研發LS3機器人、BigDog機器人、Chetah機器人、LittleDog機器人。
