
簡介
半主動控制系統主要指的是半主動懸架控制系統。半主動懸架技術,即通過可控阻尼器,依據一定的控制規律對阻尼為進行實時調節,於1974年由美國加州大學戴維斯分校機械工程系D.E.Kamopp教授等人提出。
懸架系統的半主動控制研究與開發是現代控制領域與車輛動力學的一個國際性前沿課題。懸架是保證汽車安全性的重要裝置,開發能夠滿足人們對其安全、舒適、高效、節能、清潔和智慧型化等要求的汽車懸架系統既是這一領域的發展的方向,又是對汽車工業的一大挑戰。
懸架系統分類及對比
懸架系統主要由彈簧和阻尼減振器組成,是車架與車橋之間傳力裝置的總稱。主要功能不僅包括隔絕或緩和路面不平引起的振動和衝擊、改善車輛行駛的平順性、保持輪胎與地面的附著力、提供給汽車良好的操縱穩定性,而且還影響汽車的牽引、轉向及動撓度性能。
被動懸架控制系統
被動懸架一般是由參數值固定的彈簧和阻尼減振器組成。它具有結構簡單,可靠性強,不消耗能量等優點,但這種懸架系統的阻尼和剛度參數一般是通過經驗設計方法選擇,一經確定,在汽車行駛過程中就無法適應外部環境的變化而不能實時調節。因此,在複雜多變的環境或性能要求高的情況下,被動懸架就難以達到較為理想的性能要求了,這也就限制了被動懸架系統性能的改善和發展。
主動懸架控制系統
主動懸架主要由測量系統、反饋控制中心、能量動力源和電子控制執行器四個部分組成,其設計的特點是以主動力發生裝置替代或者是部分替代被動懸架系統中的彈簣和阻尼減振器。它的工作原理是將測量系統獲得的車體振動信息傳遞給控制中心進行處理,控制中心發出指令給能量源產生控制力,最後由電子控制執行器衰減懸架的振動。與被動懸架系統相比主動懸架系統有明顯的優勢,但是結構複雜,需要外加能源且造價高,所以發展受到了一定的制約,只在少數高級轎車中有所套用。
半主動懸架控制系統
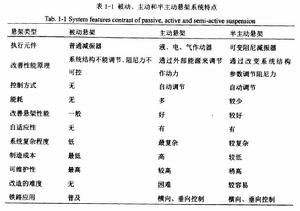
半主動懸架由具有可變特性的彈黃或阻尼減振器組成,其減振方式、原理與被動懸架相似,但是懸架參數可在一定的範圍內調節,可獲得類似主動控制的減振效果而且結構簡單,工作時幾乎不消耗車輛動力,所以在現有研究中有關可調阻尼減振器實現的半主動控制較豐富尤其是基於磁流變阻尼器的半主動控制研究故有較好的套用前景。
與被動、主動系統對比如圖所示。
 半主動控制系統
半主動控制系統研究意義
半主動懸架由具有可變特性的彈黃或阻尼減振器組成,其減振方式、原理與被動懸架相似,但是懸架參數可在一定的範圍內調節,可獲得類似主動控制的減振效果,而且結構簡單,工作時幾乎不消耗車輛動力,所以在現有研究中有關可調阻尼減振器實現的半主動控制較豐富,尤其是基於磁流變阻尼器的半主動控制研究。故有較好的套用前景。
我國發展現狀
我國在半主動懸架領域也做了一些研究工作。林野通過研究單自由度系統半主動懸架的振動傳遞性質,提出了正對開關控制髙頻震顫問題的改進方法;同濟大學的陸正剛研巧了空氣彈簧輔助腔對半主動懸架控制的影響;西南交通大學王月明等通過仿真研究了半主動懸架開關控制的簡化方法;鐵道科學研究院姚建偉等人將模糊控制引入鐵路車輛半主動控制中並進行了相關實驗研究;鐵道科學研究院的董孝卿等人針對鐵道車輛半主動懸架系統通過仿真研究最優控制理論的控制效果。
系統構成
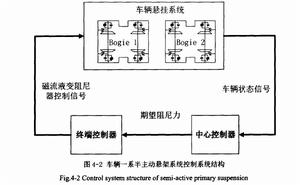
半主動懸架控制系統包括參數可控元件,及通過感測器獲取的車輛信息和軌道線路信息,按照一定的控制算法,通過調節懸架元件的參數,使獲得一定的半主動控制力,改善車輛的動力學性能。
半主動懸架控制系統由中屯、控制單元、終端控制單元和感測器組成。每個轉向架設有一個中也控制單元,中也控制單元的主要功詔是實時檢測車輛和線路狀態,通過計算得到主動控制力矩的大小。每個磁流液變阻尼器設有一台終端控制單元。終端控制單元的主要功能是控制磁流液變阻尼器的控剌電流強度,使磁流液變阻巧器組產生獲得期望的主動控制力矩建立的巧流液變阻尼器控制逆模型就是用於終端控制單元。通過終端控制單元磁流液變阻尼器逆模型,輸入期望阻尼力的大小,輸出磁流液變阻尼器控制電流強度值,從而產生與期望主動控制力矩相符的半主動力矩。半主動懇架控制系統結構如下圖所示。
 半主動控制系統
半主動控制系統控制策略
狀態一:如果輪對角速度小於轉向架角速度且沖角絕對值正在變大,在這種狀態下,需要提高磁流液變阻尼器的阻尼係數產生主動控制力矩來減小沖角;
狀態二:如果此時輪對角速度大於轉向架角速度且沖角絕對值正在變大,在這種狀態下,需要提髙磁流液變阻尼器的阻尼係數產生主動控制力矩來減小沖角;
狀態三:如果輪對角速度大幹轉向架角速度且沖角絕對值正在變小,在運種狀態下,需要減小磁流液變阻尼器的阻尼係數促進減小沖角;
狀態四:如果輪對角速度小於轉向架角速度且沖角絕對值正在變小,在這種狀態下,需要減小磁流液變阻尼器的阻尼係數促進減小沖角。
 半主動控制系統
半主動控制系統