解決方法
匯流排伺服舵機。我們先來看一下我們現在使用舵機和數字舵機時遇見的問題。
 匯流排伺服舵機
匯流排伺服舵機1、我們利用舵機(不論數字還是模擬)搭建一個仿人機器人,用了17個自由度,用了17個舵機。每根舵機都要接到控制板上,根據舵機的身體布局位置,有的線還需要延長,所有的線加起來可能需要十幾個連線埠,像團海草一樣把機器人整個身體纏了個遍,機器人在走動的時候突然發現舵機線被拉鬆了,機器人一個趔趄把脖子都摔斷了。控制板上需要做出17個以上PWM信號接口,那可是長長的一排插針啊。如果對於一個健忘的人來說,還很容易忘記哪個插針對應哪個舵機,好不容易接上後,一通電,機器人腿轉到背後去了,一排查發現腿關節接到肩關節了。當我們需要給機器人加些感測器時候,突然發現,IO口都被用掉了,定時器不夠用了,天啊,我想會是個噩夢。
2、舵機的每一個舵機的參數也不一定一樣,不時還會出現居中位置偏差較大的情況,好不容易裝出機器人來後發現舵機的中位不一致,和理論計算得出來的機器人步態不相匹配。這樣麻煩就大了,需要對每一個舵機設定中位,在傳送舵機控制信號的時候還需要對每一個舵機都單獨加入這個修正值,而不能統一調用某一個通用的PWM產生函式,天啊,一個步態就是17行代碼啊。當然,達人們都是勤勞和嚴謹的,並不覺得這是辛苦的事情。而有些人會買可以通過編程器調節和設定中位的舵機,當然,可能會很貴。
3、機器人步態的編寫是件非常麻煩的事,我們在編寫步態的時候給舵機的初始值基本上都是有偏差的,比如我想肩關節轉到180度位置,但由於舵機個體差異的問題,這個值已經讓舵機處於堵轉狀態。過一會之後,我們發現機器人一隻胳膊不能用了,可憐的機器人啊,還不知道到底發生了什麼事。時候檢查發現機器人肩關節堵轉時間過久,導致電機過熱,讓舵機外殼融化,然後導致減速齒輪箱錯位,舵機就失效了,機器人的一隻胳膊就殘廢了。
方法解釋
第一點的原因我們可以理解為,現在的舵機都是並聯控制的,舵機線都是需要接到控制板上,我們可以幻想,如果舵機可以串聯就好了。腳腕關鍵的舵機串到膝關節,一直串到髖關節,最後一根線直接接到主控板上,甚至可以把所有的舵機都串進去。我們可以驚喜的發現,只需要1根線,最多4根線就可以搞定17個舵機了。
第二點的原因是舵機自己不能存儲中位修正值,修正值需要我們發控制脈衝的時候補進去。我們可以想像,如果我告訴舵機:你好,放鬆,我要修正你的頭的位置,它有點歪了。然後舵機就放鬆下來,我們把它的頭擺正,然後告訴它:這是你頭部的正確方向,你以後需要以這位置為正前方,然後舵機就把這個位置記下來了,並且我告訴它轉60度它就以這為初始位置轉60多,不多不少。
第三點原因是機器人沒有神經系統,根本不知道疼痛。如果我們能給控制卡提供每一個關節的力矩、電流、電壓、溫度、轉角,那么機器人缺胳膊少腿的問題都可以解決。呵呵,好像有點神奇了。
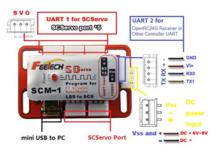
其實一點不神奇,因為自從串列匯流排智慧型舵機出現後,這些幻想都可以瞬間變成現實。匯流排伺服舵機簡單的說就是可以串聯,並且接受數據信號,能夠提供關節的力矩、電流、溫度、角度等信息,能準確控制位置的運動單元,外形可以和舵機一模一樣。我們用一個帶串口給匯流排傳送一條指令:舵機ID1,轉20度;舵機ID2轉30度,舵機ID3休息……直到理論上最後一個舵機。然後所有的舵機就會執行這條指令。這樣一連串的動作組成的動作組,一連串的動作組組成工程。就形成了一套你想要的舞蹈、體操、或是一段步態的路徑。想想,智慧火花就此開啟了。
總的來說,串列匯流排智慧型舵機好處實在是太多了。但市面上是否存在這樣的一整套結構呢。從舵機到主控板一整套的方案。答案是有的。經過多年研究實驗,開發出一套即從主控板到舵機的串列匯流排智慧型舵機套用解決方案,該方案的發布對於許多想開發機械臂,機器人,積木,以及許多DIY項目的簡直是一個福音。即使不是碼農,沒有接觸過代碼的人類也能夠在極短的時間內熟悉這套底層系統。這樣在認知的道路上大大節約了時間。串列匯流排智慧型舵機具有極簡布線,開機回中位功能,數據反饋功能,磁編碼更穩定可控,開放協定功能,可以接入你想要的功能,如觸摸感應,語音通話,距離感應器等等。真正解決了底層解放的生態模式。
