研究歷程
 動態失速
動態失速傳統的靜態失速認為,當翼型來流迎角增大到某一定值時,在翼型表面會出現大規模流動分離而導致升力突 然下降和阻力的突然增加。
在20世紀40年代,Himmelskamp首次在實驗中發現了動態失速現象的存在。但由於當時人們對航空器的機動性要求不高而且分析手段有限,所以並未對這一現象進行深入研究。
直到60年代一次直升機旋翼實驗後才引起普遍關注,關於動態失速性能的研究也隨之展開。Ham最早給出了關於動態失速發展過程的理論描述。進入70年代後,McCroskey等對動態失速現象作了許多實驗研究,使得人們對動態失速的發生機理有了更進一步的認識。1988年Carr L W在他的文章中指出,動態失速的基本特徵是流暢中存在複雜的非定常分離和大尺度漩渦結構,氣動力表現出明顯的非線性遲滯特性。1998年Ekaterinaris等對過去人們研究翼型動態失速所採用的數值方法和研究成果進行了比較全面的總結,表面翼型俯仰運動的折合頻率、振幅角、平衡迎角、轉軸位置和來流馬赫數等因素都對失速渦的強度、發展和脫離有著直接影響,同時翼型的幾何形狀也極大的影響動態失速特性。
與傳統靜態升力不同,動態失速現象是個非常複雜的非線形問題。如果想得到精確的解則必須求解NS方程,而解NS方程一方面所需計算時間比較久,另一方面由於是強烈的分離流動,選擇合適的湍流模型也很困難。所以現在工程上一般使用經驗或者半經驗的動態失速模型來預測升力曲線。
動態失速控制
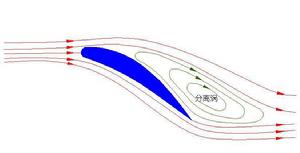
動態失速控制的主要目的是既要保持動態失速所具有的優勢——最大升力有較大增加,同時又要降低阻力和負的氣動阻尼。動態失速渦的形成、移動以及脫出表征了動態失速的特性,它是升力增加、大的阻力以及危險的俯仰力矩峰的來源。而該渦是在前緣附近形成的,因此動態失速控制裝置如果位於前緣附近則會更有效的影響動態失速特性。
已經有幾種動態失速控制裝置進行了研究:固定前緣條能完全避免動態失速渦,但在前行槳葉上有不可接受的性質;彈性改變前緣半徑可以在動態失速渦形成區非常局部地影響動態失速,但這種裝置非常不宜套用於旋翼;人為噴氣概念是更進一步的裝置,它不僅在定常分離方面有優勢,在動態失速控制方面也有優勢,這裡靠近翼型前緣噴氣的位置確定裝置恰當與否,噴氣可以打開和關閉,因此與旋轉槳葉相配,對於旋翼槳葉套用應是在後行槳葉上能起作用而在前行槳葉上又不會是一個干擾。
研究方法
CFD法是目前動態失速預測的一種重要方法。一般地說,非定常流CFD計算能以幾個級別來處理,以能力遞增來排列,它們是:
(1)使用面元法的無粘/不可壓(位流)解;
(2)不可壓的粘性附面層法;
(3)粘性-無粘疊代法;
(4)納維爾-斯托克斯法。
Sankar等介紹了三種CFD方法預測翼型動態失速情況的比較,這三種CFD方法分別是:
(1)喬治亞工學院隱含時間進程法,使用Spalart-Allmaras紊流模型。
(2)ONERA納維爾-斯托克斯法,使用Spalart-Allmaras紊流模型。
(3)ONERA粘流-無粘流疊代法,使用兩方程模型。
Datta和Chopra以UH-60A直升機為例詳細地研究了CFD方法預測旋翼動態失速的能力。研究共分三個階段進行:
第一階段使用測量的氣動載荷、阻尼器載荷和操縱角來驗證結構模型。採用非線性揮舞-擺振-扭轉耦合方程,並推廣到在軸向延伸和彈性扭轉中包括彎曲非線性。阻尼器力作為一組集中力和力矩施加到結構上。變距拉桿被模擬為揮舞、擺振和扭動線形彈簧和阻尼器。
第二階段使用給定的槳葉變形計算氣動載荷,氣動載荷計算使用具有Leishman-Beddoes動態失速的非定常升力線模型、以及具有與升力線形模型相同的自由尾跡的單槳葉RANS CFD模型,因此它們不僅有相同的槳葉變形而且有相同的入流。升力線模型得出配平角後,在CFD模型中保持不變。
第三階段使用CFD/CSD松耦合由第一原理預測動態失速載荷,CFD採用跨音速非定常旋翼納維爾-斯托克斯程式,CSD採用馬里蘭大學先進旋翼飛機程式。
