通過測量多點加速度結合加速度修正因子,獲得質量塊上的等效加速度,利用質量塊的加速度與質量的乘積來復現力值,將復現的力值與被校力感測器的測量結果進行對比來得到校準結果 。
根據牛頓第二定律,感測器所受的動態力可以投照公式(1)表示為:
F=ma (1)
式中:
m——總有效質量,作用在感測器敏感元件上的所有質量之和,kg;
a——質量塊上的加速渡,m/s^2
在參考頻率點,感測器靈敏度 S=U/F。
靈敏度相對誤差△S=(S-Sr)/Sr*100%
相位延遲△∮=∮u-∮a
 動態力校準
動態力校準正弦力法:
正弦力校準系統如圖1所示,被校力感測器安裝在電磁振動台上,質量塊連線在力感測器上。正弦力標準裝置是採用五個加速度感測器測試質量塊頂面加速度。力感測器信號和加速度感測器信號都被程控標定儀採集後轉換為數位訊號。程控標定儀輸出信號經過功率放大器放大後驅動振動台工作。各模組同步工作,同時進行數據處理,獲得校準結果 。
 動態力校準
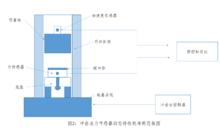
動態力校準衝擊力法:
衝擊力校準系統如圖2所示,被校力感測器安裝在衝擊台底座上,質量塊上連線加速度感測器。力感測器信號和加速度感測器信號都被程控標定儀採集後轉換為數位訊號。在動態力感測器量程範圍內選,用衝擊力標準裝置對動態力感測器進行校準。對於選擇的每個測量點,在衝擊力標準裝置的同一高度,連續衝擊3次。各模組同步工作,同時進行數據處理,獲得校準結果 。
 動態力校準
動態力校準