機械式液壓動力掌舵系統一般由液壓泵、油管、壓力流量控制閥體、V型傳動皮帶、儲油罐等部件構成。為保持壓力,不論是否需要轉向助力,系統總要處於工作狀態,能耗較高。又由於液壓泵的壓力很大,也比較容易損害助力系統。
電動助力掌舵系統、利用電動機產生的動力協助駕車者進行動力轉向。它一般是由轉矩(轉向)感測器、電子控制單元、電動機、減速器、機械轉向器、以及畜電池電源所構成。 在轉向時,轉矩(轉向)感測器會“感覺”到轉向盤的力矩和擬轉動的方向,這些信號會通過數據匯流排發給電子控制單元,電控單元會根據傳動力矩、擬轉的方向等數據信號,向電動機控制器發出動作指令,從而電動機就會根據具體的需要輸出相應大小的轉動力矩,從而產生了助力轉向。如果不轉向,則本套系統就不工作,處於休眠狀態等待調用。由於電動助力轉向的工作特性,其方向感更好,高速時更穩。又由於它不轉向時不工作,所以,也多少程度上節省了能源。但是這種掌舵系統一般只在小型遊艇上運用到。
電子液壓助力掌舵系統一般由儲油罐、轉向助力控制單元、電動泵、轉向機、轉向助力感測器等組成,其中轉向助力控制單元和電動泵是一個整體結構。電子液壓轉向助力系統克服了傳統的液壓轉向助力系統的缺點。它所採用的液壓泵不再靠發動機皮帶直接驅動,而是採用一個電動泵,它所有的工作的狀態都是由電子控制單元根據遊艇的行駛速度、轉向角度等信號計算出的最理想狀態。簡單地說,在低速大轉向時,電子控制單元驅動電子液壓泵以高速運轉輸出較大功率,使駕駛員打方向省力;遊艇在高速行駛時,液壓控制單元驅動電子液壓泵以較低的速度運轉,在不至於影響高速打轉向的需要同時,節省一部分發動機功率。
 助力掌舵系統
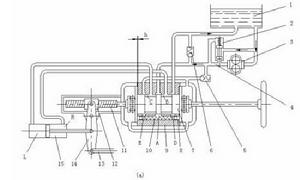
助力掌舵系統如圖(a)所示,助力轉向系統主要由油泵3、控制閥(滑閥7和閥體9)、螺桿螺母式轉向器
(11、12)及助力缸15等組成。
滑閥7同轉向螺桿11連為一體,兩端設有兩個止推軸承。由於滑閥7的長度比閥體9的寬度稍大,所以兩個止推軸承端面與閥體端面之間有軸向間隙h,使滑閥連同轉向螺桿一起能在閥體內做軸向移動。回位彈簧10有一定的預緊力,將兩個反作用柱塞頂向閥體兩端,滑閥兩端的擋圈正好卡在兩個反作用柱塞的外端,使滑閥在不轉向時一直處於閥體的中間位置。滑閥上有兩道油槽C、B,閥體的相應配合面上有三道油槽A、D、E。油泵3由發動機通過帶或齒輪來驅動,壓力油經油管流向控制閥,再經控制閥流向動力缸L、R腔。
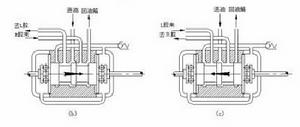
直線行駛時,如圖(a)所示,滑閥7在回位彈簧10和反作用閥8的作用下處於中間位置,動力缸15兩端均與回油孔道連通,油泵輸出的油液通過進油道量孔4進入閥體9的環槽A,然後分成兩路:一路通過環槽B和D,另一路流過環槽C和E。由於滑閥7在中間位置,兩路油液經回油孔道流回油箱,整個系統內油路相通,油壓處於低壓狀態。
 助力掌舵系統
助力掌舵系統左轉彎時滑閥7左移,如圖1(c)所示,油路改變流通方向,助力缸15加力方向相反。
