
簡介
城市軌道交通的列車自動控制系統ATC(Automatic Train Control),通常包括3個子系統:
1、列車自動監控子系統ATS(Automatic Train Supervision)。主要作用是監督列車運行狀態,實現列車運行管理自動化;
2、列車自動防護子系統,其運用的主要目的是實現列車的問隔控制、超速防護和進路的安全監控.保證行車安全;
3、列車自動運行系統ATO(Automatic Train Operation),主要完成站間內動運行和定位置停車,並能接收控制中心指令,實現列車運行自動調整。適應列車高速、高密度運行的需要。
3個子系統通過信息交換網路構成閉環系統,可以充分發揮保征行車安全,提高運行效率,縮短行車間隔,促進管理現代,提高綜合運營能力和服務質量的作用。
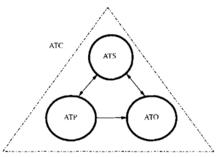 ATC各子系統關係
ATC各子系統關係ATC系統可歸結為圖中所示的相互關係。ATP子系統作為保證行車安全的基礎設施,示於圖所示三角形的底部。ATP子系統包括車載設備和地面設備,聯鎖設備作為安全設施也納入ATP子系統。
ATS子系統作為高層次的行車指揮系統示於圖所示三角形的頂部。ATS子系統通過系統內部的人機聯繫環節及ATP/ATO軌旁設備和站、段設備收集信息,實現列車追蹤、列車進路的自動沒置及列車運行調整等功能。
ATO子系統接受來自ATP/ATS系統的地面信息和行車控制指令以及必要的人工操作實現列車加速運行、惰行、減速、停車和端站的折返作業控制。
ATO技術發展概況
城市軌道交通自動化技術經歷了幾個發展階段:
(1) 傳統運行方式;
(2) ATC(列車自動控制)技術,含ATP(列車自動防護)、ATS(列車自動監控)ATO(列車自動運行)三個子系統;
(3)全自動無人駕駛方式,如法國的VAL系統、日本的新交通系統等。
最近一個世紀,高載客量、無人駕駛捷運的實施在技術上和經濟上成為可能,從上世紀80年代以來,無人駕駛技術進入到了一個新階段。它將自動控制、自動加速和在司機室速度顯示器上形成的編碼軌道電路組合起來,以使駕駛功能自動化,儘管在列車到站後最終的停車精確性上還有欠缺,但在提高乘客舒適度上已能達到預期的效果。
當然,現在ATO的發展方向很寬,但歸根到底可分為兩種運行制式:手動或自動。在選擇自動模式時,ATO系統代替司機操縱列車牽引、制動,自動的實現列車啟動加速、勻速運行、減速制動等基本駕駛功能。然而,不論是由司機駕駛還是A T O自動駕駛,都需要ATP系統執行速度監督和超速防護功能,具體的操作形式為:司機人工駕駛+ATP系統=手動駕駛;ATO系統自動駕駛+ATP系統=自動駕駛。
ATO系統功能
列車自動駕駛系統(Automatic TrainOperation)是捷運車站列車集中控制系統的一個子系統,是列車自動控制系統(ATC)中必不可少的一個重要子系統。它能模擬完成駕駛列車的任務,通過利用地面信息實現對列車牽引、制動、自動折返等運行控制,使列車經常處於最佳運行狀態,提高乘客的乘坐舒適度和列車的準點率,節約能源。另外,它還提供定點停車、車門控制和給車站反饋列車定位信息等功能。ATO使列車運營降低了成本、增加運營彈性,使密集發車成為可能,是城市軌道交通進入自動化時代的可靠技術保障。具體功能如下:
(1)自動駕駛和目的制動:這是ATP和ATO裝備的列車常規運行模式,3種基本的駕駛階段是:加速(包括啟動)、巡行和制動(包括惰行);
(2)開門:ATO是根據ATP的命令自動打開車門;
(3)列車由車站發車;
(4)加速;
(5)巡航;
(6)在正線上停車;
(7)限速區段運行;
(8)通過車站;
(9)車輛段向正線發車;
(10)從正線向車輛段發車;
(11)列車自動折返。
工作原理
ATO子系統能保證運行時間與定點停車,還能提高運行效率,提高舒適度,減少能耗。但作為ATC的一個子系統,它的功能是要依靠ATC各子系統協調工作共同完成的,缺少ATP與ATS子系統,A T O將無法正常工作。
從運行中所起作用來說,ATO主要實現駕駛列車的功能,能進行車速的正常調整,給旅客傳送信息,進行車門的開關作業,但這只是執行操作命令,不能確保全全,這就需要ATP來進行防護。ATP起監督功能,對不符合安全的情況給予防護,保證列車不超速,車門不誤動。由此可見ATP系統是列車運行時必不可少的安全保障,ATO系統則是提高城市軌道交通列車運行水平(準點、平穩、節能)的技術措施。在任何時候,只要ATP系統正常的話,就應讓其執行防護工作,以確保行車安全。
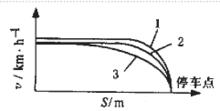 三種制動曲線
三種制動曲線如圖所示,從ATP與ATO兩子系統的三條制動曲線,也可明顯的看出:ATP主要負責“超速防護”,起保障安全的作用,ATO主要負責正常情況下的列車高質量地運行,其中,曲線1表示列車的緊急制動曲線,由ATP系統計算及監督,曲線2表示由ATP系統計算,在駕駛室顯示出來的最大允許速度,它略低於緊急制動曲線,當列車速度達到曲線2,應給出告警,曲線3是由ATO系統動態計算的制動曲線,也即正常運行情況下的停車制動曲線。
由於捷運列車的運行密度越來越大,安全性要求越來越高,所以要求有ATS系統,以使列車按照設計好的時刻表準確有序地運行,並監視列車運行狀態實現智慧型調度。
ATO技術特點比較
20世紀90年代,國內已運用的三種制式ATO車載設備分別是北京捷運1號線的英國西屋公司的ATO設備、上海捷運1號線的美國GRS的ATO設備和廣州捷運1號線運行的德國Siemens公司的ATO設備,下面就這三種設備的基本情況作一下介紹。
捷運1號線的ATO設備
(1)ATO設備
車載設備:由設在列車每一端的司機室內的ATO控制器及安裝在列車每一端的司機室車體下的兩個ATO接收天線和兩個ATO傳送天線組成。
地面設備:在各車站設備室內設有車站ATO通信器PAC(Platform ATO Communicator)。PAC記憶體有至下兩個站的線路信息,並通過與ATS接口,得到來自控制中心的控制命令。在各車站上下行站台以及進行ATO折返的折返線出軌道上,設有Xd或者X2環路及Rd環路。列車在車站停車期間,經聯鎖電路及軌道電路的有關條件控制向室外環路傳送。
(2)ATO需求數據和傳輸通道
在ATO數據的獲取過程中,車載ATP接受安全信息。安全信息由列車當前運行區段的AF-900軌道電路傳來,採用低頻脈衝調幅方式,有8種不同的調製頻率,6種用於ATP速度命令,2種用於門控命令。另外,車載TWC系統接收地面的TWC信息。該信息一般為非安全控制功能數據,諸如運行等級、列車號、目的地和跳停等。該信息採用FSK調製方式,通過地面的TWC設備向列車傳送。最後,車載接受到來自車載ATP、TWC的信息和標誌線圈的信息。
(3)控制策略
速度調節:ATO根據從ATP中獲取的MSS和TS,計算列車運行速度曲線。該區相比較簡單,只要計算加速轉勻速,勻速轉加速或制動的位置點,以保證列車運行時間不超過MSS,並且在每個軌道電路區段目標距離處速度不超過目標速度。控制器根據線路情況自動控制列車的牽引和制動運行輸出,儘量使列車按運行曲線的速度來信。當列車速度超過目標速度時,ATP設備報警;當超過最大的允許速度時,ATP實施緊急制動。
車站停車:在車站的停車位上停車時通過X2和Xd環路來實現的,列車進入車站內的環路範圍後,通過地與車之間的通信,得到距離停車點的距離,進行第一次位置調整,並使速度儘量貼近預置的停車速度曲線。在Xd環路處,進行第二次也是最後一次位置調整。若需要對運行時間進行調整,ATS將給出控制命令,如惰性控制、下一站通知等命令,由ATO執行。
上海捷運1號線ATO設備
(1)ATO設備
車載設備:主要包括主控設備,車底的ATP/TWC接收環線、TWC傳送天線(TWC為車—地通信系統)、對位天線、標誌線圈。
地面設備:包括ATC車站停車模組以及沿每個站檯布置的一組地面標誌線圈。
(2)ATO需求數據和傳輸通道
在ATO數據獲取的過程中,車在ATP接收安全信息。安全信息有列車當前運行區段的AF-900軌道電路傳頌,採用低平脈衝條幅方式,有8種不同的調製頻率,6種用於ATP速度命令,2種用於門控命令。另外,車載TWC系統接收地面TWC信息,該信息一般是非安全信息控制功能數據,諸如運行等級、列車號、目的地和跳停等。該信息採用FSK調製方式,通過地面TWC設備向列車傳送。最後,車載ATO接收來自車載ATP、TWC的信息和標誌線圈的信息。
(3)控制策略
速度調節:ATO與ATP配合調節速度。ATP共設6個速度命令,即20、30、45、55、65、80km/h。ATC系統具有4個ATS運行等級,對應於ATP的各個速度命令有相應的修正速度。參考速度就是接收到的ATP速度命令,ATS運行等級的修正速度即定點停車速度曲線三者中最小的速度。ATO根據貴旁接受的運行等級獲得的運行速度信息,並調節速度、加速度和程式減速度,以符合所接收的運行等級。在檢出限制速度變低並在正常的制動條件下,如果車速大於現在新的限制速度,則以制動減速度0.97m/s啟動常用制動。ATO子系統利用閉環反饋技術進行跳鼠,即將實際車速與參考速度之差作為誤差控制量。通過牽引或制動曲線對列車實施一定的牽引力或制動力,使誤差控制量為零。
車站停車:車載ATO系統將修正程式停車取向,以符合所接收的運行等級。精確的車站停車是通過套用軌道電路ID和邊界的轉換以及車站的環路來實現的。套用軌道電路的ID來確定正確的停車曲線的起點。列車經過站外350米處的第一對地面標誌器時,定點停車曲線便由此啟動。定點停車是建立在一個固定的減速率基礎上的。當ATS速度與定點停車曲線速度相同時,列車撞入定時停車控制模式,列車經過150m、25m出的地面標誌器時,它離開最後停車點的距離信息被不斷更新。列車經過8m出的有源地面標誌器上方,並接收到由該標誌器傳送的信號,列車既可轉為定位停車模式,實施全常制動,將車停下。車輛對位天線與地面對位天線對齊。
運行時間的調整:主要是通過選擇不同的運行等級來實現。惰行模式已經包含在運行等級中。
運行模式的改變:ATC系統的邏輯要求是必須在列車停下前可以進行轉換,否則將導致一次緊急制動。
廣州捷運1號線ATO系統
(1)ATO設備
車載設備:主要包括ATC設備機架、速度彪、控制台、ATP接收天線、PTI傳送天線。
地面設備:包括車站交叉環線和PTI環線。
(2)ATO需求和傳輸通道
由於廣州捷運採用FTGS數字頻率軌道電路,因此能傳送報文信息。地面傳送給列車的數據信息全部經軌道電路由車載ATP接收。ATO需要的信息主要通過車載ATP獲得。包括經ATP處理的信息(實際速度、運行方向、實際位置、列車長度、限速命令、制動減速度,附加信息:下一區段精度、停車位置、車站停車……),以及ATS經過ATP傳給ATO的信息(車門控制、到下一站的時間、車站號、車次號、目的地號、軌道電路號)。報文由所有類型的電碼按照一定的次序組成,是由軌道電路環路傳送的。
(3)控制策略
速度調節:ATO接收來自ATP的帶四個標誌點的速度命令信息(包括最大速度、第一限速、第二限速和入口速度的起點、終點、速度值),計算列車要求的運行速度。ATO按照時刻表和運行需要提供三種模式曲線:最大允許曲線,常規速度曲線(較最大速度曲線下降10%),節能速度曲線(較最大速度曲線下降20%):然後根據各種線路情況、車輛信息,計算所需牽引力或制動力,使列車到達最大加速度,總比ATP的最大允許速度曲線低一點。當超過警告曲線、則警告。
車站停車:車站內的位置調整點有多交叉的環路提供。相對應的車站中間的環路交叉是用來確定距離的,一般的距離是6個枕木之間。另外還定義一些粗調點,它們之間的距離減少至3個枕木間距且3個一組。ATP車載設備能接收到這些交叉點,並能把每個交叉點的處理信息傳給ATO。ATO計算每個交叉點間的距離,粗調點只有在期望的位置視窗內才能被識別到。假如識別到粗調點,則下一個交叉點便可用作為之同步。這些交叉點的位置以預置在ATO中。
惰行/巡航使ATO的一項輔助功能。時間充裕的話,可採用巡航/惰行來調整運行時間,節省能源。
正線上改變運行模式:在列車運行中的任一時刻,司機可以通過移動操縱桿使之脫離零位置,從而進行人工駕駛。在任何時候和任何駕駛階段,ATO給出可以進行駕駛的顯示,司機通過移動操作桿,使之進入零位置並按壓ATO啟動鍵,列車運行模式變為ATO模式。
展望
目前,城市交通的理想特徵是:在規劃上具有科學性,超前性,合理性,可調整性;再法律上具有權威性,連續性;在建設方面具有資金保障,技術先進,時機恰當的特點;在管理上具有現代化,高效率,低成本,應變強的特點。在自動駕駛系統(ATO)上,國外已研究適用於高密度城市軌道交通的列車駕駛系統,並在城市軌道交通系統中廣泛套用。我國在此項技術上研究較少,為了降低捷運投資,迫切需要國內具有自主產權的適用於城市軌道交通的列車自動駕駛系統。
