
簡介
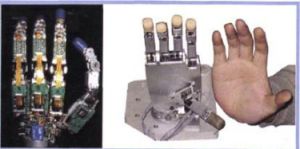 多指多自由度假手
多指多自由度假手仿生智慧型假肢沒有明確的定義,其具體評價指標也是隨著假肢技術進步而不斷提升。假肢本身就是一種仿生的機械、機電產品。冠以智慧型是強調其具有主動適應外部條件變化的能力。
假肢仿生和智慧型水平還處於初級水平。隨著機械、電子、信息等技術的飛速發展,能夠主動伸膝的動力膝關節、運動靈活精巧的多指多自由度假手等高性能仿生智慧型假肢不斷推向市場,植入式骨整合假肢也日臻完善。
種類
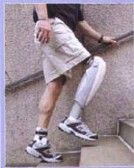 動力膝關節
動力膝關節1、多指多自由度仿生假手。
2、智慧型假肢。
3、植入式骨整合仿生假肢。
特點
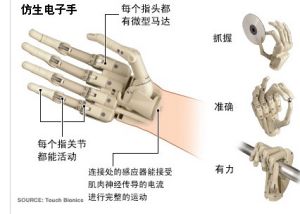 仿生電子手
仿生電子手1、仿生假肢,在一定程度上聽從大腦的指令,可以讓殘疾人像正常人一樣行走。
2、數字手,讓使用者感到觸覺的數字手,通過使用者神經控制的假肢。
3、仿生假肢手讓你感覺起來好像自己身體的一部分,而且能很容易得抓起物品,並且日常生活變得更容易。
展望
1、運動仿生和控制仿生始終是假肢研究的核心問題。
2、先進的假肢系統需要與人組成一體,才能發揮作用。
3、在假肢發展過程中除了攻克技術難關外,提高假肢工作的可靠性和儘可能降低的成本,使其能為廣大患者接受是各種先進假肢走向實用化的主要問題。
案例
仿生手臂
 仿生手臂
仿生手臂“仿生手臂”成為現實,主要歸功於截肢手術的兩個因素。首先,即便是某些自主肌已經截除,無法控制,腦的運動皮層(控制自主肌的運動)仍然能夠發出控制信號;第二,截肢時,並未切除所有曾經向該肢體運載信號的神經。也就是說,即便手臂已經切除,可以正常工作的神經末梢依然存在,它們在肩部中斷,無處傳送信息。如果將這些神經末梢重定向到某個可以正常工作的肌群,當患者想“用手抓扶手”時,大腦便會向與手之間傳遞信息的神經發出相應的信號,這些信號作用於這個可以正常工作的肌群,而非壞死的肩部末端肌群。
基本原理
 仿生假肢
仿生假肢為使用這些信號控制仿生手臂,RIC在胸肌表面放置了電極。每根電極控制用於移動義肢關節的六個電機中的一個。患者想“張手”時,大腦便會向相應的神經發出“張手”的信號,並最終定位於胸部。神經末梢接收到該信號時,所定位的胸肌開始收縮。當“張手”的胸肌開始收縮時,相應的電極會檢測到這個激活作用,並啟動控制仿生手的馬達。由於各神經末梢定位於胸肌不同的部分,佩戴仿生手臂的患者就可以同時啟動六個電機,使義肢形成比較自然的動作。
副作用
如果胸前移植神經的地方接觸到任何有溫度的物體,都會使她想起已經失去的左臂,並同樣產生冷或熱的感覺。
由大腦控制假肢運動
 由大腦控制
由大腦控制進行英國第一例手移植的西蒙·凱(SimonKay)教授以及利茲教學醫院的丹尼爾·希克斯(DanielHicks)發表評論稱神經和肌肉移植具有極大的潛力。但他們同時也警告稱:“最後的裁定取決於長期效果,這應該包括對病人佩戴和使用假肢的環境和每日時間段的評估。”
