概述
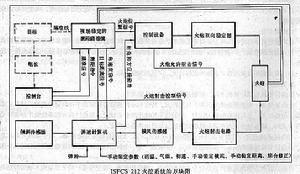 方塊圖
方塊圖該火控系統是為85-Ⅱ式主戰坦克研製的新型火控系統。
系統組成
觀瞄設備
觀瞄設備包括晝、夜、測距三合一的穩定視場的瞄準鏡,包括主瞄準鏡、雷射發射腔、雷射電源和計數器、1×潛望進鏡和微光瞄準鏡。它的功能是觀察戰場、瞄準和跟蹤目標;確定目標距離;確定目標高低和方位角速度。
它的特點有:
(1)通過直接穩定視場的方法使炮長能清楚地觀察戰場,容易瞄準,跟蹤平穩並能可靠地測量距離。
(2)微光瞄準鏡、1×潛望鏡、雷射發射腔等通過積木式設計方法與主瞄準鏡連線,這樣互換性好而且維修方便。
(3)雷射測距儀使用首/末脈衝邏輯技術,以便抑制假目標。
彈道計算機
彈道計算機包括計算機主體、控制臺和步進電機驅動器。
它的功能是:根據所選擇的彈咱、目標距離、所有自動感測器的輸出和手動裝定的參數,計算武器的射角和方位提前角;顯示所有的輸入信號、中間結果和輸出的射擊諸元;自檢;當火控系統處於分劃自動裝定工作方式時,瞄準鏡分劃由步進電機驅動器通過步進電機自動裝定。
它的技術特點有:武器射擊諸元用循環計算方式計算,以便提高首發命中率;由於採用大規模積體電路,彈道計算機的結構簡單、性能穩定而且工作可靠;用一個射擊中斷開關來快速檢查彈丸脫靶的原因。
修正量感測器
目標高低和方位角速度感測器包含在瞄準鏡中。傾斜感測器(垂直陀螺)用來測量炮耳軸的靜態和動態傾斜角。葉片式的橫風感測器(可任選)用來測量炮塔所處位置的橫風。炮塔角速度感測器(測速發電機式)用來測量在自動裝定分劃工作方式時的目標方位角速度。
火炮雙向穩定器
火炮雙向穩定器包括執行電機、陀螺儀組、轉換器、角度限制器、電磁離合器、自動鎖定裝置、控制台、測速發電機、電機放大機、放大器、配電箱、車體陀螺、炮塔陀螺、輔助油箱、液力增壓器和液壓動力缸。
火炮雙向穩定器的功能是:當坦克運動時穩定火炮,並提供火炮射擊的機會;炮長或車長可用它來驅動火炮,並在射擊前使火炮自動瞄準。
火炮雙向穩定器的技術特點是:通過使用複合控制和穩定的原理,使火炮雙向穩定器呈現出良好的火炮跟蹤性能和高的穩定精度;由於使用了先進的部件和控制方法,該火炮雙向穩定器有良好的低速性能,並具有在傾斜的坦克上迴轉火炮的能力。
控制設備
控制設備的功能是:對視場穩定的測距瞄準鏡、彈道計算機和火炮雙向穩定器之間進行電連線,綜合併處理所有的控制信號;形成火炮允許射擊信號;強迫火炮進入允許射擊門;顯示火控系統工作方式並輔助進行火炮與瞄準線準直調整。
原理與特點
該火控系統有穩像式工作方式和自動裝定分劃工作方式兩種。
穩像式工作方式
炮長控制工作檯以便驅動瞄準線。瞄準鏡的位置信號輸入給火炮雙向穩定器,火炮的位置信號反饋回來與瞄準鏡的位置信號比較形成一個閉環,於是火炮跟隨瞄準線運動。當目標已被瞄準並已測量了它的距離後,彈道計算機根據下列數據循環計算武器的射擊諸元,這些數據是來自自動感測器的距離、目標相對角速度、炮耳軸傾斜、橫風數據以及人工裝定的彈種、藥溫、氣溫、初速數據。計算好的射擊諸元與火炮位置信號進行綜合。綜合後的信號輸入到火炮雙向穩定器,通過控制火炮來自動控制火炮的射角和方位提前角。當火炮到達預定位置時,控制設備產生允許火炮射擊信號並將其傳送到火炮射擊電路。如果此時炮長按下發射按鈕,則火炮就可立即射擊。
自動裝定分劃方式
此時,鎖定穩像陀螺,於是視場不再穩定。炮塔角速度感測器產生目標的方位角速度信號。當瞄準目標並測定距離後,計算機只計算一次並產生射擊諸元信號,這些信號通過步進電機驅動器自動裝定瞄準鏡中的環形分劃。當用環形分劃再次瞄準目標後,炮長就可開火。
技術特點
瞄準鏡獨立穩定,具有較高的穩定精度,以便在坦克行進中由炮長觀察、瞄準、跟蹤目標並測定目標的距離及目標相對運動角速度;
配有允許射擊門(即符合門)使系統能自動找準確的開火時機;
在戰鬥環境中,由於射擊條件隨時都可改變,彈道計算機能循環計算並產生新的射擊諸元,不斷提供給火炮,可以提高首發命中率;
自動裝定射角和方位提前角而不擾動瞄準線,火控系統操作簡單,反應時間短,從發現目標到開火大約只需6s;
炮長1×潛望鏡與微光瞄準鏡可互換;
系統配有目標方位角速度、目標高低角速度、炮耳軸傾斜、橫風4種自動感測器和藥溫、氣溫、初速、手動裝定橫風、手動裝定距離以及在方位向和高低向的綜合修正6種手動裝定參數,還可選擇多種彈種;
火控系統可與原坦克的車長晝/夜潛望式瞄準鏡接口,此時車長可以超越控制調轉火炮到作戰方向;
火控系統是指揮儀式的,使得坦克能在行進中快速、準確地射擊運動目標。
性能數據
系統參數
目標距離200~3990米目標跟蹤角速度
方位向±20米rad/s
高低向±10米rad/s
炮耳軸傾斜±250米rad
橫風±20米/s
藥溫-40~+50℃
氣溫 -40~+50℃
初速0~-4.5%
綜合修正(對任何種類的彈藥)
方位向-3.2~+3.1mrad
高低向-3.2~+3.1mrad
信息處理精度角位置
方位向±0.1mrad
高低向±0.1mrad
目標距離±10米
目標跟蹤角速度
方位向±0.4mrad/s
高低向±0.4mrad/s
炮耳軸傾斜±10米rad
橫風±1m/s
手動裝定參數的解析度
手動裝定的距離10米
氣溫1℃
藥溫1℃
初速 -0/5%
綜合修正
方位向0.1mrad 高低向0.1mrad
最高迴轉角速度
炮塔方位向300米rad/s
火炮高低向75~100米rad/s
瞄準線的最低旋轉速度
方位向<0.3mrad/s 高低向<0.3mrad/s
