
簡介
TFM(TamedFrequencyModulation)是對MSK調製方式的一種改進。他的主要思想是將MSK調製時附加相位的銳轉折處加以平滑,從而使其功率譜的主瓣變窄,降低了帶外輻射,適合在頻寬有限的通信系統中採用。
目前介紹TFM的文章比較少,現有通信教材上的有關內容也不夠詳細。實際上,TFM是一種套用了第II類部分回響技術的頻率調製,他被人為地引入了可控的碼間串擾,按前後碼元的關係來編碼,這和MSK的相位只受本比特碼元決定的情況是小一樣的。由於這種碼間串擾是已知的,因此解捌時可以正確判決。
隨著當今世界通信設備種類越來越多,頻率資源也越來越緊張,如何高效地利用頻率資源是人們迫切需要解決的問題。TFM屬於頻率調製的一種,相對於相位調製(BPSK、QPSK等)和正交幅度調製(QAM),頻率調製具有對載波同步要求不高的優點,即他允許本地載波具有一定的頻偏和相偏,從而免除了複雜的載波恢復鎖相環路,使接收機的複雜度大大降低。相對於其他頻率調製,TFM又具有頻帶窄、頻譜利用率高的優點,所以,TFM調製技術在現代通信領域中具有相當的套用空間和前景。
FTM調製原理
FTM的表達式
數字頻率調製的表達式見式(1),其中ωc為載波的角頻率,θ(t)為附加相位。
設ak為第k個時刻也即當前時刻的碼元,△θk為當前碼元ak造成的附加相位的變化量,Tb為一個碼元持續的時間即碼元周期,則TFM調製中△θk的變化規律可由下式描述:
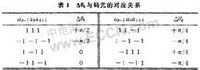
由式(2)看出△θk不僅與ak有關,還與ak前後相鄰的2個碼元有關,對應關係見表1
 FTM
FTM FTM
FTM可見,FTM是人為地引入了碼間的"干擾",使前後碼間形成的波形相互關聯。完成此功能的濾波器稱為部分回響濾波器,用S(ω)來表示,他將每個碼元的影響擴散到相鄰的2個碼元範圍內。根據式(2)可以寫出部分回響濾波器5(ω)的頻域表達式: 對傳送碼元進行了部分回響編碼後,還要進行成型濾波。在實際中往往不採用矩形脈衝成型,原因是矩形脈衝成型後的波形碼元轉換處波形陡峭,形成的基帶信號頻帶非常寬。實際通信系統中,多採用傳遞函式滿足奈奎斯特第三準則的成型濾波器,即其衝擊回響滿足:在一個碼元間隔內曲線下的淨面積為一個非零的常數,而在其他碼元間隔中恆為0。成型濾波器的衝擊回響見圖1。
採用這種成型濾波,可以獲得較窄的基帶信號頻帶。成型濾波器的傳遞函式見式(4),其中H′(ω)為a=0.5的升餘弦函式。
FTM調製的實現原理圖
FTM調製就是在MSK調製之前先進行部分回響編碼和成型濾波,原理圖如圖2所示。
 FTM
FTM我們把部分回響編碼器和成型濾波器合併在一起,如圖2中的虛線框所示,稱為前置預濾波器F(ω),他的表達式容易求出,就是S(ω)和H(ω)進行相乘:
預濾波器F(ω)的衝擊回響
 FTM
FTM採用FIR結構的數字濾波器來實現預濾波,要知道濾波器的時域回響係數。然而,用數學方法對式(5)進行傅立葉反變換推導時域回響的表達式時,計算極其繁瑣,難以得出數學上的表達式。所以這裡提出一種改進方法:(1)在Matlab中,將式(5)用M語句描述出來。下面規定M語句中各符號代表的意義為:n表示序列的下標;ω(n)表示角頻率ω;F(n)表示濾波器頻域回響;f(n)表示濾波器時域回響。F(n)為關於自變數ω(n)的函式。
(2)給定一個ω(n)序列,計算函式F(n)的結果,得到的離散序列就是濾波器頻域回響波形的抽樣點。
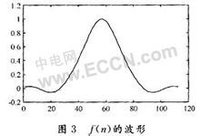
(3)使用IFFT命令,對F(n)序列進行傅立葉反變換,得到濾波器時域回響的離散序列f(n),如圖3所示。
在工程實踐中,我們使用了TMS320VC5416晶片,該晶片為TI公司的一款高性能定點DSP處理器,最高工作頻率為160MHz,在通信、信號處理等方面有比較廣泛的套用。他具有3個McBSP接口,提供最高80Mb/s的串列傳輸速度。該接口可以自動產生DMA同步事件,由晶片內部的DMA控制器直接對其進行讀寫操作,不需要CPU的干預,使CPU可以專注於對數據的運算和處理。
用查表法代替數字濾波器實現預濾波
 FTM
FTMFIR數字濾波器的實現原理是將輸入序列與濾波器的係數序列相卷積。如果濾波器的係數為41點,則每讀入一個輸入點,就要進行41次乘加運算才能得到一個輸出點,運算量非常大。這裡介紹一種查表的方法,他基於以存儲空間換取處理速度的思想,把一張事先設計好的波形表存儲在ROM中,用輸入碼元產生地址去定址ROM以得到輸出波形。
使用查表法的前提是輸入信號離散點的幅度值必須是有限個,這樣製得的波形表才是有限長的。對於TFM中的預濾波器來說,輸入信號為只有1,-1兩種幅度值的離散點,所以可以使用查表法。查表法的實現過程如下:
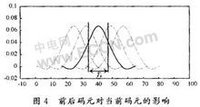
(1)制表。碼元進入預濾波器後,會對前後距離無限遠的碼元產生影響。但由於影響的大小隨著距離的增大而減小,所以只考慮對前面2個碼元和後而2個碼元的影響,換句話說,當前碼元受到前面2個碼元和後面2個碼元的影響。假設當前碼元和前後各2個碼元均為1,則前後碼元對當前碼元的影響如圖4所示。
 FTM
FTM圖4中實線為當前碼元經過濾波器產生的波形。虛線為前面2個碼元和後面2個碼元產生的波形。將當前碼元的一個Tb時間(圖中所示區域)內所有波形的幅值疊加在一起,就是連續5個碼元經過濾波器後在當前碼元的一個Tb持續期間中產生的波形。
圖4描述的是連續5個碼元均為1時的情況。實際每個碼元有1,-1兩種取值,所以要製備完整的波形表,需要將5個碼元所有可能取值的組合都列舉出來,共有25=32種。
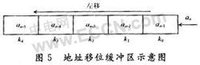
(2)查表。將輸入的連續5個碼元作為地址,去波形表中尋找對應的波形。具體方法是在DSP中設定一個長為5b的地址緩衝區,將每次到來的碼元移入到地址緩衝區的最右邊一位中,同時緩衝區中已有的元素依次左移,如圖5所示。計算緩衝區的數值k=16k4+8k3+4k2+2k1+k0,然後用k作為地址去定址波形表,取出相應的波形。
信號波形
 FTM
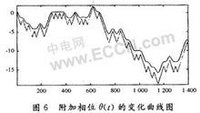
FTM附加相位θ(t)的變化曲線如圖6所示。作為比較,實線為TFM,虛線為MSK。由圖6可以看出,TFM的附加相位θ(t)變化明顯比MSK要平緩很多。
 FTM
FTMTFM已調信號波形如圖7示,正弦波的疏密程度是不同的,可以看出他正是利用正弦載波的頻率變化來表示調製信息的。
Full-timeManualFocusing全時手動對焦
Full-time MF:全時手動對焦全時手動對焦是指在自動對焦後,可由攝影師進行最終的調焦。單次自動對焦後,只需轉動對焦環即可隨時進行手動對焦。
例如:配有環形USM(超音波馬達)的所有EF鏡頭以及配有微型USM的EF 50mm f/1.4 USM鏡頭,都採用了能夠隨時從自動對焦轉換為手動對焦的全時手動對焦功能。
全時手動對焦可再分兩種:「電子式手動對焦」─搭配在大口徑超望遠鏡頭上,電子迴路檢測手動對焦環的轉動量,再驅動鏡身馬達;「全時機械式手動對焦」─啟用時,不需消耗電力,乃藉由不同於AF時的滾軸、轉環來帶動鏡片組。
