
簡介
靜電力驅動有著功耗低、回響時間短、宜於完成高頻率的驅動而且結構易於實現的特點,從而廣泛套用於微變形鏡、微型光譜儀、微陀螺、微諧振器等MEMS器件。然而採用靜電力驅動器件常常需要十分高的恆壓電源,所以可以設計一種高壓控制系統,滿足驅動要求,使得微機械感測器的器件廣泛使用 。
原理
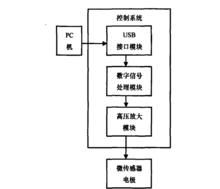
高壓控制系統的工作原理為:上位機根據相應的公式計算出靜電力驅動所需的控制電壓,經過USB,傳輸給數位訊號處理器來控制D/A轉換晶片輸出,D/A轉換後輸出電壓經過高壓放大施加到微感測器電極上。下圖為控制系統原理圖。
 高壓控制系統
高壓控制系統功能
高壓控制系統主要實現以下功能:
1、通訊功能:通過USB模組實現微機械感測器與上位機程式之間的數據傳遞。
2、控制功能:採用數位訊號處理模組按照傳輸數據控制轉換器輸出靜電力驅動所需電壓。
3、放大功能:將電壓同步放大至滿足靜電力驅動所需範圍。
硬體
數位訊號處理模組
數位訊號處理模組由定點數位訊號處理器TMS320F2812和D/A轉換器AD5381組成,其中2812具有高的處理速度、強大的處理功能,時鐘頻率可達150MHz,片上包含有128k的Flash、128k的ROM以及18k的RAM,滿足程式編寫的需要,同時還包含豐富的外設接口和事件管理器,十分適合於大批量數據處理的控制場合。而AD5381是一款理想的多通道數模轉換器,它具有40個數模轉換通道,12位的解析度,具備並行、串列以及I2C三種數據傳輸方式,單通道轉換時間可以達到30ns,可以滿足模組要求。
USB模組
USB模組選用Cypress公司的CY7C68013,該晶片具有以下優點¨1:數據吞吐量在高速傳輸模式下傳輸速率可達480 Mb/s,全速模式下傳輸速率達到12Mb/s,滿足傳輸需求;具有大容量的FIFO用於數據緩衝,當作為從設備時可採用同步或異步FIFO方式與DSP進行連線。
高壓放大模組
高壓放大模組採用SUPERTEX公司的HV256晶片,該晶片具有32個獨立的高壓放大器,因此輸出電壓最大可達到295V,可以滿足靜電力驅動的要求,因此該晶片廣泛套用於MEMS靜電力驅動。
電路
控制系統的硬體電路主要包括DSP2812最小系統電路、DSP與USB晶片68013的信號通訊電路、DSP與D/A轉換晶片的連線電路。
CY68013與DSP2812的硬體電路
採用CY7C68013是一個非常方便的USB2.0實現方案,68013與DSP的連線方法有兩種:可程式的GPIF主控方式和Slave FIFO方式。在本設計中,採用Slave FIFO方式,異步讀寫。在這種方式下DSP可以像讀寫普通FIFO一樣對CY7C68013進行讀寫,DSP2812與68013的連線如下圖所示。
 高壓控制系統
高壓控制系統DSP讀取USB中的數據時,首先判斷GPIOB2(FLAGB)的電平,如果為高,說明PC有數據下發到68013中,可以進行讀操作,在進行讀操作時將FIFOADR[0:1]位置低,從而選擇EP2連線埠。同時將SLCS與SLOE同時置低。DSP向USB寫數據時,DSP判斷GPIOB3(FLAGC)的電平,當該電平為高,說明FIFO中還沒有寫滿,可以進行寫操作,在進行寫操作時將FIFOADR第0位置為低、第1位置高,從而選擇EP6連線埠同時將SLCS置低、SLOE置高。
DSP與AD5381的硬體連線
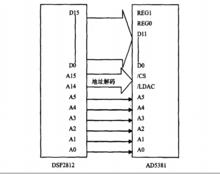
AD5381的數據輸入直接與DSP2812的數據線連線,DSP的地址線的低六位A0-A5來控制DA轉換晶片的通道選擇,AD5381的CS管腳和LDAC管腳由數位訊號處理器的地址線的高兩位經過地址解碼器來控制。數位訊號處理器與AD5381的連線如下圖所示。
 高壓控制系統
高壓控制系統軟體設計
控制系統的軟體主要包括兩個方面:USB程式和DSP2812控制系統程式。
USB程式設計
USB程式的設計主要包含:固件程式、驅動程式和主機端應用程式。固件程式是運行在CY7C68013上的程式,其主要功能包括初始化,包括設定一些特殊功能暫存器的初值、輔助硬體完成設備的重新列舉過程、處理中斷請求、數據的接受與傳送以及外圍電路的控制。首先初始化內部狀態變數,然後調用用戶初始化函式。從該函式返回後,初始化USB接口到未配置狀態並使能中斷。然後每隔1s進行一次設備重枚舉,直到端點0接受到一個SETUP包。一旦檢測到SETUP包,固件程式將開始互動的任務調度。在本方案中選擇68013工作於異步從屬FIFO模式,將其FIFO對應到EndPoint2和End—Point6,其中EndPoint2為OUT型,從主機接受數據;EndPoint6為IN型,向主機傳送數據。傳輸採用塊(Bulk)傳輸方式,在初始化函式中設定晶片工作方式。
Windows平台的USB驅動程式由3部分組成:USB主控制器驅動程式、USB匯流排驅動程式以及USB設備驅動程式。其中USB主控制器驅動程式和USB匯流排驅動程式封裝在作業系統中,由微軟公司提供。而USB設備驅動程式則採用Cypress公司提供的通用驅動程式,經過DDK編譯後直接使用。
主機端應用程式主要在PC機上採用VC++6.0編寫,要完成數據的傳輸,只需要調用幾個函式即可。
DSP程式設計
DSP主機控制模組由幾個子模組構成:
1、初始化模組,在系統上電後執行一次,通過該模組來初始化系統硬體暫存器、數據結構及全局變數;
2、通信模組,通過判斷標誌位來觀察是否有數據下發到USB晶片的緩衝區,繼而讀取數據。
3、緩衝模組,當數據比較多時,DSP晶片一次處理不過來,將數據先存入緩衝區,當一批數據處理完後,再繼續處理下一批數據。
4、D/A轉換模組,DSP晶片讀取通過USB傳輸過來的數據後,控制D/A轉化晶片進行轉換。
測試
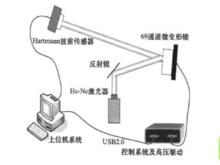
搭建如下圖所示的測試系統來檢測控制系統的性能。
 高壓控制系統
高壓控制系統該測試系統採用He—Ne雷射器作為光源,發出的雷射經過反射鏡反射後,打到微變形鏡鏡面上,經過微鏡鏡面的反射雷射由Hartmann波前感測器進行探測,上位機程式根據探測偏差以及測定的微變形鏡光學影響函式,計算出要矯正偏差所需的電極電壓,通過控制和驅動系統施加給微變形鏡電極上,來控制微變形鏡矯正畸變波。
