
空速表
空速是飛行器相對周圍空氣的運動速度。空速表就是測量飛機空速的儀表。飛行員可以根據空速表的顯示讀數判斷作用在飛機上的空氣動力情況,進而正確地操縱飛機。通過空速還可以計算地速,從而確定已飛距離和待飛時間。常用的空速表有指示空速表、真實空速表以及組合式空速表。
高度表
氣壓式高度表
 飛行試驗儀表
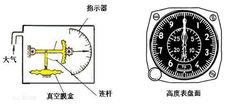
飛行試驗儀表根據大氣層的組成及特點,我們知道大氣的靜壓Ps隨著高度增加而減小。通過測量氣壓Ps,間接測量高度,就是氣壓式高度表的工作原理,這種高度表實質上是測量絕對壓力的壓力表。右圖是氣壓式高度表的簡單原理及盤面圖。
如圖所示,將高度表殼密封,空氣壓力Ps由傳壓管送入高度表內腔。高度增加表內壓力減小,置於表殼內的真空膜盒(內腔抽真空後密封)隨之膨脹而產生變形,膜盒中心的位移經傳動機構傳送,變換和放大後,帶動指針沿刻度面移動,指示出與氣壓Ps相對應的氣壓高度數值。
在盤面的下部,有個小視窗,其示數是基準面的氣壓值。可通過調整旋鈕調節。測量標準氣壓高度時,視窗內的示值應為760(毫米水銀柱)。當測量與機場的相對高度時,其示數是機場地面的氣壓值。
無線電高度表
無線電高度表是利用無線電波反射的原理工作的。飛機上裝有無線電發射機及發射接收天線。測量時,發射機經發射天線向地面發射無線電波,接收機將先後接收到由發射機直接傳來的電波和經地面反射後的回波進行比較,兩束電波存在有時間差。如果電波在傳送過程中沒有受到干擾,時間差正比於被測的高度。測量出時間差,高度也就知道了。
 飛行試驗儀表
飛行試驗儀表使用的無線電高度表有調頻式和脈衝式兩種類型。前者發射機發射的是調頻式無線電波,電波的頻率隨時間周期性地變化,因此接收機所接收的兩束電波時間差,直接轉換成信號的頻率差,測量頻率差,即可得到真實高度。而後者發射機發射的是離散脈衝,需要測量發射脈衝與反射脈衝之間的時間差。
在高度小於1000米的情況下,無線電高度表的準確度優於氣壓式高度表。因此,在飛機起飛、進場著陸階段,大部採用無線電高度測量飛機的離地高度。新設計的無線電高度表除指示被測高度外,還具有警戒高度的報警信號(聲、光報警)和故障警告旗。下圖是一個典型的無線電高度表指示器。
圖中右下方的旋鈕為警戒高度調整,駕駛員調定警戒高度後,當飛機在此高度附近時,高度表將發出報警信號,提醒駕駛員注意。當高度表測量系統產生故障時高度表警告旗即出現。
陀螺地平儀
 飛行試驗儀表
飛行試驗儀表陀螺地平儀是利用三自由度陀螺儀的特性和擺的特性做成的陀螺儀表,用來測量飛機的姿態角。飛行員憑藉陀螺地平儀的指示,才能保持飛機的正確姿態,完成飛行和作戰任務。特別是在雲中飛行或進行夜航時,飛行員看不見大地的地平線和地標,如不藉助儀表,駕駛飛機就十分困難;而且,飛行員容易產生錯覺,甚至可能造成機毀人亡的事故。由於飛行姿態對飛行的運動狀態具有決定性的影響,對保證飛行安全也具有極大的重要性,因此,作為首要飛行儀表的陀螺地平儀通常都安裝在飛機儀錶板中間的最顯眼位置上。在有些飛機上還加裝了應急地平儀,以備主地平儀出現故障時使用。
飛機的姿態角是指俯仰角和傾斜角。假如飛機上有一個地平面基準,當飛機抬頭或低頭時,飛機縱軸與這個地平面之間的夾角就是飛機的俯仰角。當飛機繞縱軸向左或向右轉動時,飛機縱向對稱平面繞縱軸轉過的角度就是飛機的傾斜角。
要測得飛機的姿態角,關鍵是在飛機上建立一個地平面或地垂線基準。我們知道,擺能夠自動尋找地垂線具有方向敏感性;但它受加速度干擾時會產生很大的誤差,缺少方向穩定性。我們也知道三自由度陀螺儀的自轉軸並不因加速度干擾而改變方向,具有方向穩定性;但它卻不能自動尋找地垂線,沒有方向敏感性。即使把自轉軸調整到與地垂線重合,由於地球自轉和飛機運動導致地垂線在慣性空間不斷改變方向,而且陀螺漂移導致自轉軸在慣性空間也不斷改變方向,這就使得起初與地垂線重合的自轉軸逐漸偏離地垂線。由此想到把擺和陀螺儀二者的優點結合在一起,即用擺敏感地垂線並對陀螺儀進行修正,使具有方向穩定性的自轉軸獲得方向敏感性,這樣便可在飛機上建立一個精確而穩定的地垂線基準。
以三自由度陀螺儀為基礎,加上修正裝置,再裝上指示機構,就可構成陀螺地平儀。若不裝指示機構,而是裝上信號感測器,則可構成垂直陀螺儀。
航向陀螺儀
 飛行試驗儀表
飛行試驗儀表航向陀螺儀(directional gyroscope),利用陀螺特性測量飛機航向的飛行儀表。陀螺轉子高速旋轉時,其旋轉軸具有方向穩定不變的特性。因此方位陀螺儀在飛機轉彎時,雖然儀表殼體隨著飛機轉向,但陀螺轉子仍穩定在一定方位上,航向刻度指出了飛機所轉過的角度。由於飛機所在位置的地理北向隨著地球自轉和飛機的運動而不斷地相對於慣性空間轉動,所以需隨時修正陀螺自轉軸的指向,才能正確地測量飛機航向角。航向陀螺儀在長時間內測量航向的精度較低,故常用來測量飛機轉彎時航向角的變化。
