1概述
電子吊秤產品種類繁多,按照讀數的方式有無線數傳式、直視式;按感測器的類型可分為電阻式和電容式;按傳力的鉤頭形式可分為鉤頭懸掛式吊秤和鉤頭式吊秤;按供電方式可分為有限電源的有線吊秤和電池電源的無線吊秤;按其它方式還可分為吊車秤、單軌吊秤和手提吊秤;根據套用場合又可以稱為防熱、防磁吊秤等。
八十年代初, 由於物資流通過程中需要使用電子吊秤來提高工作效率, 當時國內尚未有達到商用秤水平的商品化的電子吊秤產品, 因此開始了自行研製電子吊秤的工作。因當時國內應變式稱重感測器基礎材料( 如應變片箔材、應變膠等) 的技術水平、感測器製作工藝水平等制約因素的限制,應變式稱重感測器的精度較低, 尚滿足不了商用電子吊秤的要求。經過對幾種原理方案的分析對比,電容式稱重感測器對基礎材料的依賴性較小, 研製所需的材料容易解決, 研製成功的可能性較大, 因此最後選擇了電容式電子吊秤的方案。
2 電容式電子吊秤的結構與原理
電容式稱重感測器的結構: 電容式稱重感測器是由類似測力環的扁環形彈性元件、極板、極板支架、L C 振盪電路、密封殼等元件組成的變間隙式電容感測器。為了簡化結構同時也為了提高穩定性,感測器的一個極板用彈性體的表面代替, 另一片通過絕緣瓷片固定在極板支架上。感測器安裝在圓筒形的秤殼中, 為了減少偏載形成的彎矩和側向力的影響, 秤殼的下部裝有承剪膜片和萬向節。
電子吊秤電路組成: 無線傳輸的電子吊秤分為秤體和儀表兩大部分。秤體電路包括由感測器電容和陶瓷骨架的穩定電感器組成的L C 振盪器、熱敏電阻溫度感測器、編碼器電路、無線發射機、電源等; 儀表部分包括無線接收機、解調電路、微處理機、顯示器及驅動電路、微型印表機、鍵盤、大螢幕及RS 一2 3 2 接口、電源等。
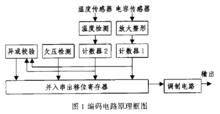
編碼器電路參見圖1, 是由時序電路、RC振盪器式溫度變換電路、計數器、校驗電路、電壓比較器、並人串出移位暫存器、調製電路、驅動電路等組成。剛開始批量生產時採用4000系列中、小規模cMos電路組成,後來開發了專用積體電路, 將大部分功能集成在一塊積體電路中,提高了可靠性,減小了編碼器的體積。
 電容式電子吊稱
電容式電子吊稱電容式電子吊秤採用的這種非差動式的變間隙電容感測器非線性非常大,不進行補償無法套用。在實際運用中採用了分段拋物線插值的算法進行線性化處理。具體方法是, 從零點到120%最大秤量分為12 個秤量點,在常溫、低溫、高溫下逐點進行標定, 為了考察感測器的穩定性, 要進行兩個循環的溫度試驗, 測量出感測器的輸出特性曲線和溫度影響曲線, 用曲線擬合的方法外推出一1 力級的數據並求出各秤量段的拋物線參數, 將這些參數與溫度影響曲線參數一起寫人稱重儀表的EPRoM中,供微處理器在稱量時計算重量使用。
下面分析一下影響電容式電子吊秤準確度的因素。電容式電子吊秤的誤差分析可從電路、機械兩方向進行, 數據處理過程引人的誤差相對於1 級商用秤的誤差數量級可忽略不計, 這裡不再分析。
電路方面: L C 振盪迴路的分布電容、電感器的電感量、時間基準隨溫度、濕度、時間的變化造成感測器零點和靈敏度的變化。溫度測量的誤差使溫度補償不準而產生附加的誤差。
機械方面: 彈性模量的溫度影響、彈性體材料的蠕變和滯後、零部件和整體裝配的對稱度誤差、裝配不當造成的力的分流(如膜片的固定面不在同一個平面上)、其他機械缺陷產生的影響等, 後幾項原因引起的誤差主要表現為重複性誤差大。
溫度影響及補償方法: 溫度對感測器性能影響的途徑有: 彈性體材料彈性模量的溫度係數、分布電容、電感器的電感量、時間基準隨溫度的變化, 感測器結構材料的熱脹冷縮對極板間隙的影響等。這些因素對感測器靈敏度影響的特點是產生的滿秤量相對誤差與秤量的關係呈非線性, 當量相對誤差與秤量的關係呈線性。靈敏度溫度補償的方法, 通過在不同溫度下對感測器的標定, 確定量程兩端(-1力級和120%最大秤量)的溫度影響曲線, 用線性插值的方法計算當前溫度下對實際秤量點的補償量。零點的溫度補償也是通過溫度試驗取得零點的溫度影響曲線, 再根據感測器的實際溫度對零點進行修正。
濕度的影響主要是通過分布電容的變化起作用。當電容感測器未密封時, 在潮濕的環境裡, 感測器輸出靈敏度下降可超過1%。為了防止濕度的影響, 電容感測器應密封起來, 而且最好採用金屬密封結構並充乾燥氮氣保護。
時間基準的準確度決定了頻率測量的準確度。時間基準的誤差對電容感測器靈敏度和零點均有影響。電容感測器採用石英晶體振盪器作為時間基準, 因其誤差在10 數量級, 且其主要誤差即溫度誤差的影響可在感測器溫度補償時一併進行補償,故時間基準誤差的影響一般可忽略不計。
感測器蠕變產生的原因除材料流變學特性外還有變形引起的溫度變化及其平衡過程。材料壓縮時溫度升高, 拉伸時溫度下降。彈性體某一截面出現彎矩時, 壓縮區溫度升高, 拉伸區溫度下降, 該溫度場相當於提高了彈性體的剛度, 當溫度場趨向平衡時, 彈性體變形量進一步加大, 這就是溫度效應產生的“ 蠕變” 。在生產實踐中發現, 大噸位的感測器蠕變過程的時間要遠遠長於小噸位的感測器, 這只能用大噸位感測器彈性體尺寸大, 熱容量大, 變形造成的溫度梯度小於小規格的感測器, 因而熱平衡的過程更慢來解釋。其他類型的感測器如板環式的應變感測器, 也可能存在熱效應產生的蠕變過程。應變感測器的蠕變可通過應變片、應變膠的負蠕變進行補償, 而電容式感測器是通過軟體進行補償。我們採用的蠕變補償算法為指數衰減曲線, 即補償量按載荷變化量的指數衰減曲線進行補償, 其算法非常簡單。後來發現補償效果有些不足, 不能完全模擬蠕變的過程, 最後改為雙指數曲線疊加法補償, 即補償量為兩條參數不同的指數衰減曲線的疊加, 補償效果較好, 算法也不複雜。
影響電容式感測器滯後的因素有感測器結構(如極板的固定方式、密封罩的結構形式)、彈性體的應力集中、彈性材料的內摩擦、彈性材料的微觀組織結構( 熱處理工藝和參數) 和感測器的製作工藝過程等。在研製的過程中我們發現極板的固定方式對滯後有很大的影響。後來分析原因是固定極板的幾個螺釘的位置在感測器彈性元件受力變形時產生微小的相對旋轉運動, 雖然其數量級在一般的精密機械中也完全可以忽略, 但在這裡卻產生了不可忽略的滯後誤差。彈性體材料的微觀組織結構對滯後也有很大的影響。材料( 40CrNiMoA )的硬度高時, 滯後明顯加大, 最後我們將硬度控制在H3B0左右, 滯後明顯減小。感測器的製作工藝過程對滯後也有較大的影響。發現一批感測器滯後較大, 故障分析時發現, 這些感測器在生產過程中用釺焊工藝焊接密封殼時, 焊料流到了應力集中區。有資料指出, 錫原子可以滲到鋼的晶格之間, 使鋼容易產生晶格間的滑移, 從而產生了較大的滯後。
電容式感測器的分散性較大。產生分散性的原因有極板的形位誤差如平面度、極板間隙平行度的差別, 電參數如分布電容、電感的分散性等等。這些因素不但影響感測器的輸出特性的一致性, 也影響感測器的溫度特性的一致性, 因此每台感測器都要經過不同溫度下的標定, 計算出不同的補償曲線和辛卜償係數。影響電子吊秤重複性誤差的一個非常重要的感測器特性是抗偏載能力。對拉式感測器來講, 就是當它承受偏載形成的彎矩時, 產生多大的附加輸出, 稱重感測器的標準中沒有此項要求, 而廠家一般也不給出這一數據。結構的不對稱性是造成電容式感測器抗偏載能力下降的主要因素。在生產實踐中, 應裝備偏載測試裝置, 用來調整感測器的抗偏載能力,就如調整平行梁感測器的四角誤差一樣。
影響電子吊秤長期穩定性的因素, 除了L C 振盪迴路的分布電容、電感器的電感量變化外, 還有機械部分的因素, 如極板的移位和間隙的變化等,而且是比較常見的引起感測器特性發生較大的變化的原因。
3電容式電子吊秤的特點
電容式感測器是頻率量輸出, 而頻率量信號放大過程不引人誤差, 測量容易, 信號處理過程引人誤差的環節少, 對提高系統的精度有利。
感測器自身無發熱, 無需預熱時間。
由於感測器的一致性差, 每台均需做不同溫度下的標定, 因而生產耗用工時、設備機時較多, 生產成本較大。
現用的彈性環式感測器體積大、重量大、結構形式單一, 限制了它的套用範圍。
電容感測器對溫度變化敏感, 特別是零點, 溫度變化劇烈時零點漂移較大, 很明顯是由於感測器各部分溫度不均勻造成的。裝配調試感測器時, 用手在彈性體上摸一下, 零點就漂個不停。為了減少溫度變化的影響, 秤體內加有隔熱材料, 平時使用中, 還需要在秤體外部加上保溫罩, 減少陽光輻射等因素造成較大的零點漂移。溫度對電容感測器的靈敏度也有較大的影響, 並且不是完全可逆的, 估計原因之一與感測器內部水分的轉移和重新分布有關。這也影響了感測器的長期穩定性。
電容式稱重感測器的套用廠家較少, 總的人力、資金和技術投人相對於應變感測器也少得多,因而技術改進相對緩慢, 其性能和製造工藝一直沒有根本性的突破。實際上, 電容感測器結構和生產工藝尚有許多需要改進的地方, 由於各種原因未能實現。如果能持續不斷的改進, 電容式稱重感測器性能必定能進一步提高。
4改進電容式電子吊秤性能的方法
減少分布電容不穩定的影響
影響電容式感測器的電氣方面的最不穩定因素是分布電容。對穩定性影響最大的分布電容是極板固定結構的分布電容和電感器的寄生分布電容。
形成極板固定結構的分布電容的介質是絕緣瓷片及粘結瓷片與極板、極板支架的有機粘接劑。這裡, 有機粘接劑是影響分布電容穩定性的最大因素。有機物介電常數隨溫度變化大, 且與溫度呈非線性的關係, 引起極板固定結構分布電容隨溫度變化較大, 造成電容感測器零點輸出和靈敏度的溫度影響較大。這些影響與溫度呈非線性的關係。一般在20-30℃ 以下, 隨溫度上升零點輸出和感測器靈敏度也上升; 超過20-30℃, 隨溫度上升零點輸出和感測器靈敏度反而下降。在低溫和高溫段, 溫度影響曲線的斜率是很大的。雖然電容式感測器採用了溫度補償的辦法減少溫度的影響, 但大家知道,一般好的補償措施也只能將影響因素的影響降低1個數量級左右, 由於低溫段和高溫段溫度影響曲線的斜率很大, 因此溫度補償後感測器仍會存在一定的溫度影響。在實踐中發現, 溫度的影響有一部分是不可逆的。分析認為, 一部分原因是由於有機材料的吸濕性大, 在溫度循環時, 感測器內部水分的分布情況發生了變化, 造成分布電容的變化引起感測器特性的變化。從以上分析可以看到, 固定極板的有機粘接劑是影響感測器精度的不利因素。如果能改進工藝, 取消不穩定的有機粘結劑, 感測器的性能指標將有很大的提高。
電容式感測器的電感器是用冷緊繞工藝將漆包線繞在陶瓷骨架上, 再被覆絕緣漆製成。有機絕緣漆是電感器寄生分布電容最大的不穩定因素。用無機材料代替有機絕緣材料是提高感測器穩定性的一個有效的措施。
控制感測器內部的水分是提高穩定性的一個重要措施。感測器應採用真空充氮工藝, 即先將感測器乾燥處理, 內部抽成真空, 再充入乾燥的氮氣。氮氣應經過乾燥處理, 增加氮氣濕監測裝置, 保證氮氣的露點在-4 0 ℃ 以下。當然, 密封結構的檢漏是必不可少的工序, 否則一切乾燥密封措施都行同虛設。
增加L C 振盪器穩定性的方法
電子吊秤用的無線電發射機對電容感測器的LC振盪器有一定的干擾。改進方法一是加強電路的去藕, 二是提高LC振盪槽路的Q值。剛才提到電容式感測器的電感器是用冷緊繞工藝將漆包線繞在陶瓷骨架上, 其本身的Q 值在工作頻段為10 0 以上, 但由於電感器體積較大, 整個振盪電路又是密封在電容感測器內狹小的空間裡, 造成LC 振盪槽路的Q 值大大下降。這可以從將振盪電路裝人感測器後振盪波形的輸出幅度大幅度下降看出。一個改進方法就是減小電感器的體積。雖然原始Q 值可能會有所下降, 但最終振盪槽路的Q 值將會提高。
提高感測電容器初始極板間隙的穩定性
在修理生產中的不合格產品和返廠維修產品時發現, 相當大比例產品的感測電容器初始極板間隙發生了明顯的變化, 而且大多數是不均勻的變化。電容感測器生產過程中對極板間隙的要求是非常高的, 整個裝配工作是在淨化間裡進行, 防止異物進人極板間隙。如果極板間隙不平行, 感測器的抗偏載能力將大大下降, 其表現是電子吊秤的重複性誤差和旋轉誤差變大, 感測器的輸出特性也將發生變化, 表現為電子吊秤的非線性誤差變大。
