雷達無源定位

利用偵察設備接收雷達輻射信號,經過處理來確定它的空間或地理位置的雷達對抗技術。
雷達無源定位
正文
利用偵察設備接收雷達輻射信號,經過處理來確定它的空間或地理位置的雷達對抗技術。無源定位的方法有測向定位法、測時差定位法和測向時差定位法等。若偵察站和雷達都在陸地或海上,且不考慮地球曲率的影響,則可用二維平面數學關係式求雷達位置。若偵察設備裝在飛機或衛星上,且與地面或海上的雷達相距不十分遠,則採用三維空間的數學關係式求解雷達位置。
測向定位法 分為二維平面測向定位和三維空間測向定位。 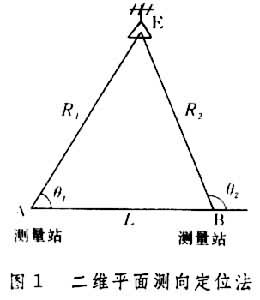 雷達無源定位① 二維平面測向定位:在已知的兩個或多個不同位置上測量雷達輻射電磁波的方向,各站測得的雷達方向數據按三角測量法交會計算出雷達的位置(圖1)。雷達與兩個測量站的距離分別為
雷達無源定位① 二維平面測向定位:在已知的兩個或多個不同位置上測量雷達輻射電磁波的方向,各站測得的雷達方向數據按三角測量法交會計算出雷達的位置(圖1)。雷達與兩個測量站的距離分別為 
② 三維空間測向定位:利用飛機或衛星上的偵察設備,測出地面雷達信號的俯仰角和方向角,並利用導航數據,通過計算來確定雷達的地理位置。只需要一架飛機攜帶偵察設備沿發射源飛行就能進行這種測量(圖2)。 ,其中R為斜距;H為高度;φ為俯仰角。偵察設備採用雙通道接收,例如正交的二維相位干涉儀,同時測量地面雷達的俯仰角和方向角。理論上,只需要測量單個雷達脈衝的方向數據即可計算出地面雷達的位置。
,其中R為斜距;H為高度;φ為俯仰角。偵察設備採用雙通道接收,例如正交的二維相位干涉儀,同時測量地面雷達的俯仰角和方向角。理論上,只需要測量單個雷達脈衝的方向數據即可計算出地面雷達的位置。 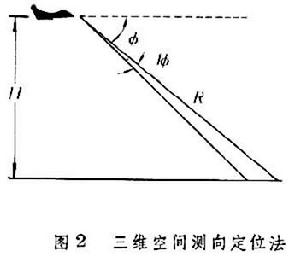 雷達無源定位測時差定位法 利用“反羅蘭”原理定位。①二維平面的定位原理:地面已知位置的兩個偵察站收到同一雷達發射脈衝的等時間差值的軌跡為一組雙曲線,利用三個或更多個偵察站獲得同一雷達信號的等時間差的兩組或幾組雙曲線後,由雙曲線的交點和一定的初始條件即可確定雷達的位置(圖3)。②三維空間的定位原理:在三個以上已知位置飛行器上的偵察設備收到同一地面雷達輻射信號等時間差值的軌跡為兩個以上雙曲面,它們與地球表面相交可得到相應的位置線,由位置線的交點和一定的初始條件即可確定雷達的位置。為了保證測量精度,各偵察設備必須有統一的基準時鐘信號,各站測得的信號到達時間送中央處理站,計算出雷達位置數據。
雷達無源定位測時差定位法 利用“反羅蘭”原理定位。①二維平面的定位原理:地面已知位置的兩個偵察站收到同一雷達發射脈衝的等時間差值的軌跡為一組雙曲線,利用三個或更多個偵察站獲得同一雷達信號的等時間差的兩組或幾組雙曲線後,由雙曲線的交點和一定的初始條件即可確定雷達的位置(圖3)。②三維空間的定位原理:在三個以上已知位置飛行器上的偵察設備收到同一地面雷達輻射信號等時間差值的軌跡為兩個以上雙曲面,它們與地球表面相交可得到相應的位置線,由位置線的交點和一定的初始條件即可確定雷達的位置。為了保證測量精度,各偵察設備必須有統一的基準時鐘信號,各站測得的信號到達時間送中央處理站,計算出雷達位置數據。 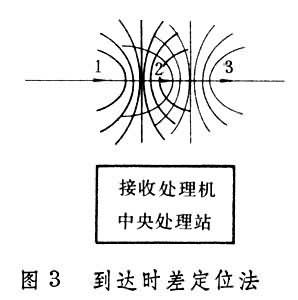 雷達無源定位測向時差定位法 或稱相關法(圖4)。它分別用主站A和副站B兩個站同時接收雷達信號,其中副站接收到信號即刻轉發到A站,利用主站直接測到的雷達信號與副站轉發到的信號之間的時間差td,以及主站測到的雷達信號方向角θ1,便可按公式
雷達無源定位測向時差定位法 或稱相關法(圖4)。它分別用主站A和副站B兩個站同時接收雷達信號,其中副站接收到信號即刻轉發到A站,利用主站直接測到的雷達信號與副站轉發到的信號之間的時間差td,以及主站測到的雷達信號方向角θ1,便可按公式 
計算出雷達的位置。 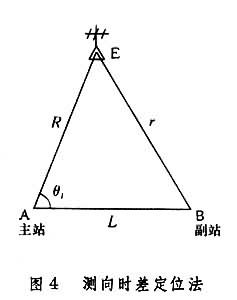 雷達無源定位偵察設備在測量雷達信號的方向角時存在誤差,所以常採用統計學方法來進行定位計算。按照所選擇定位系統參數關係的不同,可假設為不同的數學模型,利用系統運動方程和測量方程是線性的或非線性的函式關係式,把偵察設備從一個雷達輻射源多次獲取的不同測向數據和相應的偵察站位置數據相組合,作為系統數學模型的輸入,根據選定的數學模型,採用適當的數據處理方法,如最小二乘法、卡爾曼濾波法等,得出雷達的最佳位置估值。
雷達無源定位偵察設備在測量雷達信號的方向角時存在誤差,所以常採用統計學方法來進行定位計算。按照所選擇定位系統參數關係的不同,可假設為不同的數學模型,利用系統運動方程和測量方程是線性的或非線性的函式關係式,把偵察設備從一個雷達輻射源多次獲取的不同測向數據和相應的偵察站位置數據相組合,作為系統數學模型的輸入,根據選定的數學模型,採用適當的數據處理方法,如最小二乘法、卡爾曼濾波法等,得出雷達的最佳位置估值。配圖
相關連線
