
簡介
早在1986年,第一個量子反饋控制的理論方案就已被提出,用於壓縮態的製備。在經典控制理論中,反饋的思想是尤為重要的。反饋的引入是為了彌補不可預知的擾動對控制系統的影響,或者在不知道系統的初始狀態時,可以實現對系統的自動控制。在量子反饋控制中,感測器從被控量子系統上獲得有關係統的信息,控制器對這些信息進行處理並反饋到系統,從而以一種期望的方式來對量子系統進行主動控制。
核心思想
量子反饋控制核心思想是實時控制量子系統所處的狀態,即在對量子系統進行實時的控制時,控制系統通過一直對量子系統所處的狀態進行檢測,再將檢測結果反饋給控制器,然後控制器依據量子系統此時所處的狀態,進行相應的信息處理,然後將處理後的信息反饋到系統,繼而對量子系統進行主動的控制。量子反饋控制通過對量子系統進行實時的監控,隨後根據檢測的結果及時作出反映,再對量子系統進行調整。反饋控制能夠補救不可避免的擾動對系統造成的影響,而且即使不清楚系統的最初狀態,也能夠達到對量子系統進行自動控制的目的。
量子反饋控制策略
量子反饋控制策略分為兩種:
(1)基於測量的量子反饋控制策略。基於測量的量子反饋控制方案包括馬爾可夫量子反饋控制和貝葉斯量子反饋控制。
(2)無測量的量子反饋控制策略。無測量的量子反饋控制策略包括含時延非馬爾可夫量子反饋控制和相干量子反饋控制。
基於測量的量子反饋控制策略
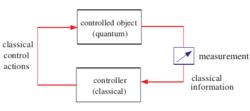 圖1 基於測量的量子反饋控制方案圖
圖1 基於測量的量子反饋控制方案圖基於測量的量子反饋控制的基本原理如圖1所示。在這裡,控制器是經典系統,只能處理經典信息,在控制的過程中,需要對量子系統的測量。眾所周知測量會破壞反饋信息的量子特性,所以測量後反饋信息變成了經典信息。雖然被控制系統是量子系統,但是反饋控制器處理的是經典信息,反饋環中量子相干性已經被破壞,這樣的策略可以被稱為具有經典反饋的量子控制。在傳統的經典硬體中,可以實現控制算法,正是由於這一點,基於測量的反饋已被廣泛套用。
馬爾可夫量子反饋控制
在馬爾可夫量子反饋控制中,任何時間延遲都被忽略並且假定控制器無記憶,即測量結果立即反饋給系統,改變系統的動力學,然後控制器將結果遺忘。因此,描述演化的方程是一個馬爾可夫主方程。第一個馬爾可夫量子反饋控制方案是利用零差探測來獲得光電流,然後將光電流反饋到光腔,從而改變原腔的動力學行為。經過嚴格推導,得到了零差調節反饋的一般主方程:
 量子反饋控制
量子反饋控制 量子反饋控制
量子反饋控制 量子反饋控制
量子反饋控制其中,L 是光腔的 Liouville 超算符,K 是任意 Liouville 超算符,但是需要滿足條件,即一般 −L 也是一個 Liouville 超算符。ρ 是系統的約化密度算符,a 和 分別是腔場的湮滅和產生算符, 是探測器的探測效率。由於馬爾可夫量子反饋在實驗實現方面相對簡單,因而得到了廣泛的套用,在不同量子系統中量子糾纏態的製備和穩定方面套用馬爾可夫量子反饋的方案較多。馬爾可夫量子反饋控制使用每個即時測量信號控制量子系統的哈密頓量,而被控制系統以前的知識不被套用,它採用的是一種直接的反饋方式。
貝葉斯量子反饋控制
貝葉斯量子反饋控制是一個基於連續狀態估計的量子反饋控制方案。為了從測量中獲得詳細的信息,把反饋控制過程分為兩個步驟:狀態估計和反饋控制。因為最好的動態變數的估計是從不斷的測量記錄中得到的,不能僅僅依靠最新的結果,這類似於經典的貝葉斯估計,因此,稱為貝葉斯量子反饋控制,它描述演化的動力學方程是非馬爾可夫的。由於貝葉斯量子反饋中信息獲取更為準確,一般情況下在理論結果方面較好,但是在理論計算以及實驗實現方面要比馬爾可夫量子反饋控制難得多。
含時延非馬爾可夫量子反饋控制
以上兩種量子反饋控制策略均忽略了反饋時間延遲這一因素。反饋的效果可以在一個有效主方程中體現,使問題更容易處理。當反饋延遲時間遠小於系統弛豫時間的時候,這種處理是合理的。在光學腔系統中馬爾可夫反饋是合理的,因為腔的弛豫時間比反饋的時間延遲長得多。然而,延遲在某些情況下不能被忽略。例如,當使用量子反饋進行退相干控制的時候,延遲時間和退相干時間必須同時考慮。在許多情況下,非零反饋延遲時間可能不可避免地會產生一定的影響。因此,處理含時間延遲的非馬爾可夫問題是十分重要的。1999年,Giovannetti等首先研究了含時間延遲的非馬爾可夫量子反饋控制 。同時,利用此方法研究了貓態的退相干抑制問題,結果表明如果反饋延遲時間小於或等於退相干時間的一半,反饋參數的適當選擇可以有效地抑制系統的退相干。
相干量子反饋控制
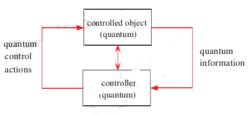 圖2 無測量的量子反饋控制方案圖
圖2 無測量的量子反饋控制方案圖為了保持反饋環的相干性,相干量子反饋方案被提出 。它是一種無測量的反饋控制,基本原理如圖2所示。在整個反饋環中,所有的裝置都是量子系統,相干地與被控制系統發生相互作用。在相干反饋策略中,反饋環中流動的信息都是量子信息。量子信息的交換可以是單向的,通過量子信號實現,如一束光;也可以是雙向的,通過直接的物理耦合來實現。相干反饋測量從概念上看很簡單,但是,目前很少人知道如何系統地設計完全的相干反饋環。相干反饋的優點包括傳送量子信息的能力,以及控制器的時間尺度可以更好地與量子系統匹配。
不同量子反饋控制的優勢
上述幾種量子反饋控制策略各自有不同的優點。在具體實驗的實現方面,馬爾可夫量子反饋控制策略是送些策略中最易實現的,而其他的反饋控制策略在實驗上比較難以實現。貝葉斯量子反饋控制策略以及含時延的非馬爾可夫量子反饋控制策略二者可分別適用在不同的條件中,各有優勢。相干量子反饋控制策略能夠最好的保持量子相干性,但是該策略在實驗上較難實現。隨著科學家不斷地研究,各種量子反饋控制策略逐步套用於量子通信及各種量子計算任務中。
