
簡介
適用實時系統是指適用於某一類環境或套用的實時系統。設計適用於實時環境的作業系統的主要困難是,在實時環境規定的時間限額內,必須對用戶做出相應的回響。如果系統不能在規定的時間限額內完成指定的任務,那么就可能導致整個系統的崩潰 ;其次實時系統套用場景具有不確定性,多變性和適用性。例如自動駕駛系統和火車的訂票系統的適用性是不同的。適用實時系統是實時系統中的一種,是針對解決實際套用中關鍵的問題而設計的。
需求
實時控制
當把計算機用於生產過程的控制, 以形成以計算機為中心的控制系統時,系統要求能實時採集現場數據,並對所採集的數據進行及時處理,進而自動地控制相應的執行機構,使某些(個)參數(如溫度、壓力、方位等)能按預定的規律變化,以保證產品的質量和提高產量。類似地,也可將計算機用於對武器的控制,如火炮的自動控制系統、飛機的自動駕駛系統,以及飛彈的制導系統等。此外,隨著大規模積體電路的發展,已製作出各種類型的晶片,並可將這些晶片嵌入到各種儀器和設備中,用來對設備的工作進行實時控制,這就構成了所謂的智慧型儀器和設備。在這些設備中也需要配置某種類型的、能進行實時控制的系統。通常把用於進行實時控制的系統稱為實時系統。
實時信息處理
通常,人們把用於對信息進行實時處理的系統稱為實時信息處理系統。該系統由一台或多台主機通過通信線路連線到成百上千個遠程終端上,計算機接收從遠程終端上發來的服務請求,根據用戶提出的請求對信息進行檢索和處理,並在很短的時間內為用戶做出正確的回響。典型的實時信息處理系統有早期的飛機或火車的訂票系統、情報檢索系統等。
實時任務
在實時系統中必然存在著若干個實時任務,這些任務通常與某個(些)外部設備相關,能反應或控制相應的外部設備,因而帶有某種程度的緊迫性。可從不同的角度對實時任務加以分類。
按任務執行時是否呈現周期性來劃分
(1) 周期性實時任務。外部設備周期性地發出激勵信號給計算機,要求它按指定周期循環執行,以便周期性地控制某外部設備。
(2) 非周期性實時任務。外部設備所發出的激勵信號並無明顯的周期性,但都必須聯繫著一個截止時間(Deadline)。它又可分為開始截止時間(某任務在某時間以前必須開始執行)和完成截止時間(某任務在某時間以前必須完成)兩部分。
根據對截止時間的要求來劃分
(1) 硬實時任務(Hard real-time Task)。系統必須滿足任務對截止時間的要求,否則可能出現難以預測的結果。
(2) 軟實時任務(Soft real-time Task)。它也聯繫著一個截止時間,但並不嚴格,若偶爾錯過了任務的截止時間,對系統產生的影響也不會太大。
實時系統的基本特點
時間約束
實時系統的任務具有一定的時間約束(截止時間)。根據截止時間,實時系統的實時性分為“硬實時”和“軟實時”。硬實時是指套用的時間需求能夠得到完全滿足,否則就造成重大安全事故,甚至造成重大的生命財產損失和生態破壞,如在航空航天、軍事、核工業等一些關鍵領域中的套用。軟實時是指某些套用雖然提出時間需求,但實時任務偶爾違反這種需求對系統運行及環境不會造成嚴重影響,如監控系統等和信息採集系統等。
可預測性
可預測性是指系統能夠對實時任務的執行時間進行判斷,確定是否能夠滿足任務的時限要求。由於實時系統對時間約束要求的嚴格性,使可預測性成為實時系統的一項重要性能要求。除了要求硬體延遲的可預測性以外,還要求軟體系統的可預測性,包括應用程式的回響時間是可預測的,即在有限的時間內完成必須的工作;以及作業系統的可預測性,即實時原語、調度函式等運行開銷應是有界的,以保證應用程式執行時間的有界性。
可靠性
大多數實時系統要求有較高的可靠性。在一些重要的實時套用中,任何不可靠因素和計算機的一個微小故障,或某些特定強實時任務(又叫關鍵任務)超過時限,都可能引起難以預測的嚴重後果。為此,系統需要採用靜態分析和保留資源的方法及冗餘配置,使系統在最壞情況下都能正常工作或避免損失。可靠性已成為衡量實時系統性能不可缺少的重要指標。
互動作用
實時系統通常運行在一定的環境下,外部環境是實時系統不可缺少的一個組成部分。計算機子系統一般是控制系統,它必須在規定的時間內對外部請求做出反應。外部物理環境往往是被控子系統,兩者互相作用構成完整的實時系統。大多數控制子系統必須連續運轉以保證子系統的正常工作或準備對任何異常行為採取行動。
多任務類
在實時系統中,不但包括周期任務、偶發任務、非周期任務,還包括非實時任務。實時任務要求要滿足時限,而非實時任務要求要使其回響時間儘可能的短。多種類型任務的混合,使系統的可調度性分析更加困難。
複雜性
任務的約束包括時間約束、資源約束、執行順序約束和性能約束。時間約束是任何實時系統都固有的約束。資源約束是指多個實時任務共享有限的資源時,必須按照一定的資源訪問控制協定進行同步,以避免死鎖和高優先權任務被低優先權任務堵塞的時間(即優先權倒置時間)不可預測。執行順序約束是指各任務的啟動和執行必須滿足一定的時間和順序約束。例如,在分散式端到端(end-to-end)實時系統很重,同一任務的各子任務之間存在前驅/後驅約束關係,需要執行同步協定來管理子任務的啟動和控制子任務的執行,使它們滿足時間約束和系統可調度要求。性能約束是指必須滿足如可靠性、可用性、可預測性、服務質量(Quality of Service,QoS)等性能指標。
適用於室內服務機器人的實時物體識別系統
隨著科技的進步和人口老齡化問題的加劇, 服務機器人得到了國內外的普遍關注和深入研究。物體的操作與搬運是服務機器人最重要的基礎功能之一,而一個功能完善的物體操作過程的實現離不開準確、實時的物體檢測與識別。因此,快速、 準確的物體檢測與識別是服務機器人研究領域非常具有套用前景的課題。國際服務機器人標準測試 RoboCup@Home 也專門將物體檢測和識別作為了一項挑戰測試。
為了能夠準確地執行手臂規劃和抓取操作, 機器人的物體識別系統不僅需要識別出目標物體的標識,還需要提供目標物體及其附近障礙物的準確空間位置信息(物體定位)。 由於真實環境複雜多變, 在機器人上實現實時可靠的物體識別系統仍是具有挑戰性的任務。
一般地, 根據處理數據的類型不同, 機器人的物體識別分為基於二維圖像以及基於深度信息的方法。 基於二維圖像的物體識別主要利用圖像的顏色、紋理、局部特徵等。
 適用實時系統
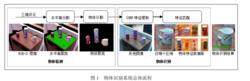
適用實時系統物體識別系統總體流程如圖所示,輸入為三維點雲和彩色圖像,共分為兩步。第一步實現物體的檢測,由於室內環境中的機器人可操作物體(如飲料、杯子等)通常放置於桌子、架子等水平面上,我們首先將這些水平面從三維點雲中分割出來(如圖, 水平面分割過程中 RGB-D 圖像上Ⅰ處綠色標記的區域), 以此為基礎再對每個水平面之上的剩餘點雲進行分割得到相互獨立的物體聚類, 這些聚類即檢測出的物體。 第二步進行物體識別,首先定位每個物體聚類在彩色圖像中的區域, 並提取每個區域的 SURF 特徵,然後與物體特徵資料庫進行特徵匹配, 輸出識別的物體標識。
實時的物體檢測和識別是機器人視覺領域一個具有挑戰性的任務。本文設計並實現了一種適用於室內服務機器人的物體識別系統, 通過三維點雲分割實現快速有效的物體檢測和定位,採用 SURF 特徵匹配的方法實現準確的物體識別。在真實室內環境多個場景中的實驗結果以及 RoboCup@Home 物體識別相關測試的結果共同表明了該系統有效可行,可較好地滿足室內服務機器人物體檢測和識別的實時性和可靠性要求。
