
主要組成部件
角速度陀螺儀是單自由度陀螺儀的一種,由單自由度陀螺、彈性元件、阻尼器和信號感測器組成。
其中單自由度陀螺由一個框架和轉子構成,用於敏感轉角、角速度、角加速度等信息;彈性元件用於提供彈性約束,當陀螺儀相對殼體轉動一個角度時,彈性元件就會產生和其偏轉方向相反的彈性約束力矩;阻尼器用於提供粘性約束,當陀螺儀相對殼體有一個角速度時,阻尼器會產生與其轉動方向相反的阻尼力矩;信號感測器用於信號的輸出。
基本原理
 角速度陀螺儀
角速度陀螺儀 角速度陀螺儀
角速度陀螺儀 角速度陀螺儀
角速度陀螺儀 角速度陀螺儀
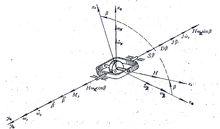
角速度陀螺儀取框架坐標係為 ,殼體坐標係為 ,如右圖所示。這兩個坐標系的原點均和陀螺儀的支承中心重合,其中 軸與自傳軸重合, 軸為輸入軸(也即敏感軸),框架軸為輸出軸。
 角速度陀螺儀
角速度陀螺儀 角速度陀螺儀
角速度陀螺儀 角速度陀螺儀
角速度陀螺儀 角速度陀螺儀
角速度陀螺儀 角速度陀螺儀
角速度陀螺儀 角速度陀螺儀
角速度陀螺儀 角速度陀螺儀
角速度陀螺儀 角速度陀螺儀
角速度陀螺儀 角速度陀螺儀
角速度陀螺儀設陀螺儀繞框架軸相對殼體轉動的角加速度、角速度和轉角分別為 、 和 ,如圖中所示。設殼體繞殼體坐標系各軸相對慣性空間轉動的角加速度分別為 、 和 ,角速度分別為 、 和 。
 角速度陀螺儀 角速度陀螺儀
角速度陀螺儀 角速度陀螺儀當陀螺儀相對殼體轉動一個角度 時,由彈性元件產生的彈性約束力矩為
 角速度陀螺儀
角速度陀螺儀其中S為彈性約束係數。
角速度陀螺儀當陀螺儀相對殼體有一個角速度 時,由阻尼器產生的阻尼力矩為
 角速度陀螺儀
角速度陀螺儀其中D為阻尼係數。
 角速度陀螺儀
角速度陀螺儀除彈性約束力矩和阻尼力矩外,還存在干擾力矩,用 表示。
角速度陀螺儀 角速度陀螺儀 角速度陀螺儀
角速度陀螺儀 角速度陀螺儀當陀螺儀相對殼體出現角加速度 ,以及殼體繞 軸相對慣性空間出現角加速度 時,就會沿輸出軸的相對轉動慣性力矩和牽連轉動慣性力矩,即
 角速度陀螺儀
角速度陀螺儀其中J為陀螺儀繞輸出軸的轉動慣量。
當殼體繞和軸相對慣性空間以角速度和轉動時,產生沿輸出軸的哥氏慣性力矩即陀螺力矩,表示如下
 角速度陀螺儀
角速度陀螺儀其中H為陀螺動量矩。
由動靜法可得陀螺儀繞輸出軸的力矩平衡方程為
 角速度陀螺儀
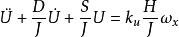
角速度陀螺儀整理後可得
 角速度陀螺儀 角速度陀螺儀
角速度陀螺儀 角速度陀螺儀 角速度陀螺儀
角速度陀螺儀由於轉角 很小( ),在忽略干擾項的影響下,上式可簡化為
 角速度陀螺儀 角速度陀螺儀
角速度陀螺儀 角速度陀螺儀 角速度陀螺儀
角速度陀螺儀信號感測器輸出的是電壓信息,且電壓大小與轉角 成正比,即
將其帶入上面簡化後的式子可得角速度陀螺儀工作特性方程
 角速度陀螺儀
角速度陀螺儀改寫為
 角速度陀螺儀
角速度陀螺儀 角速度陀螺儀
角速度陀螺儀其中無阻尼振動固有角頻率
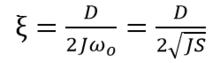
阻尼比為
 角速度陀螺儀
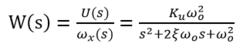
角速度陀螺儀對上式進行拉氏變換,可得角速度陀螺儀的傳遞函式為
 角速度陀螺儀
角速度陀螺儀 角速度陀螺儀
角速度陀螺儀其中 。
 角速度陀螺儀
角速度陀螺儀由於角速度陀螺儀由彈性約束來達到平衡狀態,當陀螺力矩與彈性約束力矩平衡時,即 ,故有
 角速度陀螺儀
角速度陀螺儀因為信號感測器輸出電壓與轉角成正比,故輸出信號與輸入角速度成正比,角速度陀螺儀也由此得名。
性能提高方法
角速度陀螺儀易受干擾力矩的影響,可採用滾珠軸承支承形式,彈性支承形式,液浮支承形式來減小干擾力矩。如扭桿式半液浮角速度陀螺儀,其將陀螺電機裝在密封的浮子內,在浮子與殼體之間充滿矽油,通過矽油的浮力來減小摩擦力矩。
