視圖插值的幾何原理
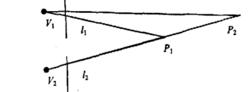 圖1
圖1假設場景不隨時問變化.當相機在兩個不同的位置成像時,由於相機的相對運動,空間中的同一點在像平面上所成的像將發生位移,即產生通常所說的視差,如圖1所示.
因此。可以用空間中的點在兩個視圖中的視差大小來表示該點的深度,將視差視為一個向量,則視差的方向與相機運動的方向相反,大小和深度成反比.在計算兩視點連線上某個虛擬視點處的視圖時.如果能得到圖像上像素的視差向量.只要先對視差向量進行線性插值運算,將像素的灰度值或顏色信息平移至且標位置,即可得到虛擬視點處的視景.
圖插值的關鍵技術
兩視圖上同名像素點的匹配
對應點匹配問題是計算機視覺中的一大難題,主要有基於灰度相關的匹配、基於特徵的匹配和基於相位相關的匹配等算法,但都無法做到既高效又準確。遺傳算法、模擬遇火算法等最佳化算法也已引入了像素點匹配計算中.
插值算法
當虛擬視點位於兩個真實視點的連線上時,對像素點的位移向量進行線性插值可以較精確地計算出該像素點在虛擬視圖中的位置.當虛擬祝點不在兩個真實視點的連線上時,若像素點的位移量不大,估計出的像素點在虛擬視圖中的位置的誤差也比較小;當像素點的位移較大時,線性插值技術就不能準確地估計像素點在虛擬視圖中的位置,考慮使用2次或高次插值技術來提高像素點的位移量,代價是需要較大的計算量。
重疊問題
重疊問題是指在兩個真實視圖中,像素點並未重疊,但在兩組(或兩組以上)的同名像素點進行位移向量插值時,得到的在虛擬視圖中的位置是重疊的.重疊問題反映了真實空間中對象的相互遮擋關係.當存在這種現象的時候,像素的位置關係一般會發生突變,出現重疊問題的虛擬視點可以視為一個臨界視點,在這個臨界視點的兩側,空間中的相互遮擋關係發生了變化.臨界視點處的視圖的繪製可以參考計算機圖形學中的z-buffer算法,先繪製視差較小的像素,再繪製視差較大的像素。
黑洞問題
當真實視圖I1。中的像素在真實視圖I2:中不能找到同名點時,在虛擬視圖中就會出現黑洞.黑洞問題是真實視圖採樣量不足和空間中的相互遮擋關係造成的.
全景空問中的視圖插值技術
在HVS系統里使用了一種在視線方向上進行視圖插值的技術.實現了“遠看”和“近看”.該方法容易帶來“鬼影”現象,原因是兩個視圖之間存在尺度上的不一致,空間中兩點的連線在兩個視圖上的投影長度不相等。選擇在與視線垂直的向上進行插值時 .兩個申同視圖之聞只存在簡單的平移關係,不會引入更多的誤差,可以有效地抑制鬼影現象的發生。
