簡介
船模拖車電控系統(electric drive control system of towing carriage for ship model basin)是指用於實現船模拖車正常運動的電力施動及控制等電路組合的整體。船模拖車是測試船舶模型水動力學方面的試驗裝置,一般用2台或4台直流電動機拖動,對於重達數十噸的大型船模拖車,由4台100kW以上的電動機拖動。拖車牽引著船模在拖曳水池(有的水池中裝有造波機,在水面上形成波浪)兩側壁的軌道上行駛,使船模模仿船舶在水中航行(見圖1)。人們依據船模航行試驗中所測得之數據來分析船舶設計的優劣。
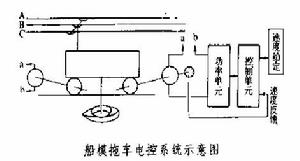 圖1
圖1船舶在水中行駛並不總是直線航行,常為曲線狀行駛,還常上下顛簸,為此,先進的船模拖車電控系統可使船模進行x、y、z三維空間運行試驗。採用微機更易於三維空間操縱。實用的電控系統中通常x軸方向為速度控制,y、z軸方向為位主控制。
船模拖車負載的特點
大慣量、小阻力是船模拖車負載的特點。船模水動力學試驗數據準確度與其控制系統的速度穩定精度緊密相關。為此,要求電控系統穩速精度高達0.02%,速度給定準確、重複性好,調速比為50~100為了獲取儘可能長的測試區段,要求電控系統起動、制動及其過渡過程的行程距離短,拖車加、減速度為0.01~0.1g。為此,電控系統中沒有控制起動電流環節,來改變拖車加速度。減速制動時將能量回饋電網。為了安全,另設有機械剎車裝置,用油壓制動器時拖車的減速度可達0.4g。
電控系統
船模拖車電控系統可分為模擬穩速控制系統與數字模擬混合控制系統。
(1)模擬穩速控制系統。該系統將測速發電機電壓與速度給定電壓比較後,其差值送入調節器放大,用以控制直流電機的勵磁或變流裝置的柵控角。
(2)數字模擬混合控制系統。該系統將脈衝發生器測得的速度值(或頻率值)與速度給定值(或頻率給定值)比較後,其差值經運算、變換後,再控制晶閘管的觸發角。該系統具有模擬穩速控制系統的動態品質,穩速精度優於±0.01%,速度給定數位化、頻率化,提高了給定精度,並且速度給定重複性好。
船模拖車發展過程
早在18世紀末英國就建造了船模拖車,其速度為0.5~100gt/min,用蒸汽機作為動力裝置。20世紀初世界各國也開始建造船模拖車,如日本船舶技術研究所1927年建造的船模拖車,其電動機由電動發電機組供電。50年代中國開始建造船模拖車。50年代前後,拖車電動機由電動發電機組或汞弧整流器變流裝置供電,採用模擬穩速控制系統,60年代後,晶閘管變流裝置取代了電動發電機組和汞弧整流器,半導體放大器取代了電子管放大器,脈衝發生器取代了測速發電機,特別是大規模固體組件的出現,使數字模擬混合控制系統應運而生。70年代後,一些電控系統還設有調速裝置的自診斷功能;微機控制系統可實時處理船模試驗數據,使電控系統和船模試驗數據運算、分析融為一體,試驗完畢,船模數據也處理完畢,省時、省工,提高了工作效率。
