簡介
準線性系統(quasi linear system)是指在實際問題中所建立的非線性系統模型應該能夠在一定的條件下線性化使得解決問題的方法簡單化而不致超過允許誤差的系統模型 。
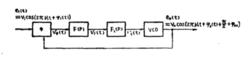 圖1
圖1嚴格地說,鎖相環是一個非線性系統,但是當環路鎖定以後,在一定的動態範圍內,系統又可以認為是線性的。這種系統稱為線性化系統或準線性系統。它和嚴格的線性系統有共性,但也有本質的區別。弄清這些區別,可使我們對環路有一個更加清楚而明確的認識為此先將圖1的鎖相環重新畫出如圖2所示。
 圖2
圖2 準線性系統
準線性系統 準線性系統
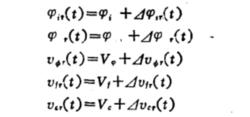
準線性系統在圖2中,所標明的信號(如,等)均為實際信號,因此其下標加有符號 r 。這些信號又可寫成如下形式:
 準線性系統
準線性系統 準線性系統
準線性系統其中,φ為固定相位;V 均為直流電壓。它們都是常數。這些常數決定了環路中各部件的工作點(如鑒相器的工作點。均為增量信號,它們使工作點擺動。在一個系統中,若所有的信號之間都存線上性關係,則稱為線性系統。例如,由線性電感、電容、電阻組成的電路即屬於此類。若系統中各個實際信號之間雖不存線上性關係,但是當各個部件的工作點固定以後,在一定的範圍內,所有增量信號之間卻存線上性關係,則這種系統稱為準線性系統。例如,線性放大器、線性鑒相器,鎖相環等就屬於這一類。
線性系統和非線性系統
線性系統
線性系統是一數學模型,是指用線性運運算元組成的系統。相較於非線性系統,線性系統的特性比較簡單。線性系統需滿足線性的特性,若線性系統還滿足非時變性(即系統的輸入信號若延遲τ秒,那么得到的輸出除了這τ秒延時以外是完全相同的),則稱為線性時不變系統。
非線性系統
一個系統,如果其輸出不與其輸入成正比,則它是非線性的。從數學上看,非線性系統的特徵是疊加原理不再成立。疊加原理是指描述系統的方程的兩個解之和仍為其解。疊加原理可以通過兩種方式失效。其一,方程本身是非線性的。其二,方程本身雖然是線性的,但邊界是未知的或運動的。
意義
“線性”與“非線性”是兩個數學名詞。所謂“線性”是指兩個量之間所存在的正比關係。若在直角坐標繫上畫出來,則是一條直線。由線性函式關係描述的系統叫線性系統。線上性系統中,部分之和等於整體。描述線性系統的方程遵從疊加原理,即方程的不同解加起來仍然是原方程的解。這是線性系統最本質的特徵之一。“非線性”是指兩個量之間的關係不是“直線”關係,在直角坐標系中呈一條曲線。最簡單的非線性函式是一元二次方程即拋物線方程。簡單地說,一切不是一次的函式關係,如一切高於一次方的多項式函式關係,都是非線性的。由非線性函式關係描述的系統稱為非線性系統。
區別
定性地說,線性關係只有一種,而非線性關係則千變萬化,不勝枚舉。線性是非線性的特例,它是簡單的比例關係,各部分的貢獻是相互獨立的;而非線性是對這種簡單關係的偏離,各部分之間彼此影響,發生耦合作用,這是產生非線性問題的複雜性和多樣性的根本原因。正因為如此,非線性系統中各種因素的獨立性就喪失了:整體不等於部分之和,疊加原理失效,非線性方程的兩個解之和不再是原方程的解。因此,對於非線性問題只能具體問題具體分析。
線性與非線性現象的區別一般還有以下特徵:
(1)在運動形式上,線性現象一般表現為時空中的平滑運動,並可用性能良好的函式關係表示,而非線性現象則表現為從規則運動向不規則運動的轉化和躍變;
(2)線性系統對外界影響的回響平緩、光滑,而非線性系統中參數的極微小變動,在一些關節點上,可以引起系統運動形式的定性改變。在自然界和人類社會中大量存在的相互作用都是非線性的,線性作用只不過是非線性作用在一定條件下的近似。
準線性系統
我們知道,在許多實際問題中所建立的方程系統往往是非線性的,它要比線性情況複雜的多,這就使我們構想所要研究的問題能否線性化為了達到這個目的,首先必須經過理想化,略去某些次要因素,使得線性化的結果仍能真實的反映原問題的本質。然而,並非每個問題都可如此線性化而且,由於初始值一般通過測量取得,不可避免會產生一定的誤差,這就要求當初始值有微小變化時,其解的變化也應任意小。
對於非線性系統
 準線性系統
準線性系統 準線性系統
準線性系統 準線性系統
準線性系統其中:A為系統線性部分的係數矩陣;為系統變數;為非線性項。我們假設它滿足以下條件:
 準線性系統
準線性系統(1) 初始條件;
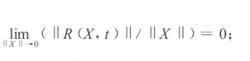
(2)極限條件
 準線性系統
準線性系統 準線性系統
準線性系統 準線性系統
準線性系統(3)相當於(*)的線性系統的特徵方程不具有零實部根,且其根都具有負實部時,我們稱係數矩陣A是穩定矩陣。當其根至少有一個具有正實部時,則稱A為不穩定矩陣,滿足這樣條件的非線性系統(*)這就是我們要研究的準線性系統。
準線性系統的穩定性問題
引理
 準線性系統
準線性系統對於系統(*)的係數矩陣A為穩定的充要條件是:對任意給定的正定實對稱矩陣Q,存在唯一正定實對稱矩陣P,使等式成立。
定理1
如果A是穩定矩陣,則系統(*)的零解是漸穩的;如果A是不穩矩陣;則(*)的零解是不穩的。
證明
 準線性系統
準線性系統 準線性系統
準線性系統 準線性系統
準線性系統設係數矩陣A是穩定矩陣,則由上引理,對於給定的實對稱單位正定矩陣,一定存在唯一的正定實對稱矩陣P,使得成立,我們構造函式,則V(X)為定正函式,下面求經過系統(*)的全導數:
 準線性系統
準線性系統將系統(*)代入此,得到
 準線性系統
準線性系統由於系統(*)是準線性系統,則準線性項R (X, t )滿足極限條件
 準線性系統
準線性系統 準線性系統
準線性系統 準線性系統
準線性系統 準線性系統
準線性系統說明當很小時,R (X, t)是X 的高階無窮小,即的符號可由它的右端項來確定,顯然
 準線性系統
準線性系統定負函式。
根據李亞普諾夫基本定理,故知系統(*)的零解是漸穩的.
準線性系統至於不穩定性的證明,可以從相應非線性系統(*)的解的結構中加以考慮。
應該指出,對於一般非線性系統(*),若接照其係數矩陣A的特徵根的符號來分類,還有下面一種情況,就是A的全部特徵根中沒有正的實部但卻有零實部,這種情況就是所謂的臨界情形。李亞普諾夫定理已經證明:在這種情形下,可以適當的分別選取函式R (X, t ),使(*)的零解X= 0既可能是穩定的,又可能是不穩定的。
可以看出,對於準線性系統的穩定性問題,關鍵就在於判斷係數矩陣A是否穩定,即A的特徵根的符號決定著系統的穩定性態。然而,當A的階數較高時,欲想求出它的全部特徵根往往是很困難的,甚至求不出來。實際上,我們所關心的不是特徵值,而只是其符號。為此,我們用霍爾維茲(Hmwitz )代數法則來解決這個問題。
定理2
(Hmwitz法則)首項係數為1的實係數多項式方程
 準線性系統
準線性系統的全部根的實部為負值的充要條件是n階霍爾維茲矩陣:
 準線性系統
準線性系統的全部主子式為正值,其中當i> n時,ai=0.
根據穩定矩陣的定義和定理1的結論,可將定理2改述為:
定理3
準線性系統設準線性系統(*)的特徵方程。有以下形式:
 準線性系統
準線性系統則系統(*)的零解X=0漸穩的充要條件是((1)的所有各階霍爾維茲行列式:
 準線性系統
準線性系統 準線性系統
準線性系統均大於零(當i > n時,ai = 0)可見,可用條件an代替。
準線性系統事實上,如果各行列均大於零((k =1,2,…,n-1),
 準線性系統
準線性系統則可由推出an>0。
