
定義
雙軸跟蹤方式的一種,聚光器兩旋轉軸中一軸的方向與地球自轉軸的方向平行,另一軸與前一軸正交並相對鏡面固定,聚光裝置繞雙軸做二維旋轉運動,跟蹤太陽視運動並將太陽輻射會聚到目標靶。
相關原理
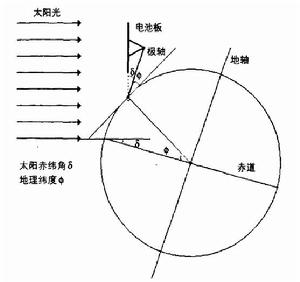 圖1:極軸式跟蹤示意圖
圖1:極軸式跟蹤示意圖太陽高度角、方位角可由當地緯度角、太陽赤緯角和時角確定,在緯度一定的情況下,可由時角與赤緯角確 定高度角與方位角。因此,極軸式跟蹤可以在保證跟蹤精度的基礎上,將太陽能板的橢圓跟蹤軌跡轉化為繞旋轉軸(極軸)的旋轉跟蹤太陽平時角,以及俯仰角跟蹤太陽赤緯角。
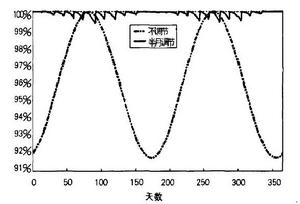 圖2:俯仰角調節效率圖
圖2:俯仰角調節效率圖如圖1所示,將太陽能板的旋轉軸(極軸)調整至與地軸平行,其安裝角即為當地緯度角Φ,此時可以通過極軸旋轉抵消地球的自轉。同時為保證太陽電池板能與太陽光垂直,使電池板與極軸夾角為太陽赤緯角δ。經過計算可以證明,極軸式跟蹤一天之內太陽能板的俯仰角變化不大於0.4°。如圖2所示,如按半月調節一次計算,光強減弱程度不足0.5%,故俯仰角可以周期性機械調節俯仰角,將二維運動轉化為一維,可少使用一台電機,最大程度簡化了系統的機械結構,降低了系統的製作與運行成本。
雙軸跟蹤
雙軸跟蹤系統是一種能夠保持太陽能電池板隨時正對太陽,使太陽光的光線隨時垂直照射太陽能電池板的動力裝置。
跟蹤控制系統使用兩種跟蹤控制方式,其一為光控,即使用光感測器,跟據天空不同區域光線強弱區別,判斷太陽位置,然後驅動電機轉動支架進行追蹤。其二為時控,根據當地經緯坐標和時間,利用天文學計算公式,計算太陽所處天空的坐標,然後驅動電機轉動支架進行追蹤。
國內公司多將兩種控制原理結合,時控為主,光控為輔,即天氣良好的情況下,利用時控追蹤太陽大約位置,然後利用光控進行精確調節,天氣條件不好的情況下,單獨利用時控進行追蹤,避免天空雜光干擾。另外也可以採用另一種結合方式:仍然以時控為主,光控為輔,即天氣良好的情況下,單純利用光控進行追蹤,如果遇到陰雨天氣,則自動轉跳到時控方式進行追蹤。時控方式中,使用GPS 模組來獲取當地的經緯度和時間。保證坐標和時間的精度,從而提高追蹤精確程度。
極軸跟蹤結構
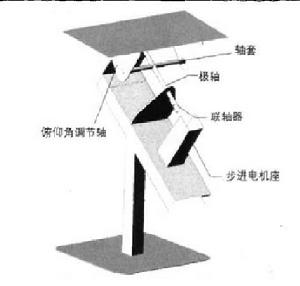 圖3:跟蹤器機械結構簡圖
圖3:跟蹤器機械結構簡圖機械結構的實現運動機構部分主要通過類似萬向節的雙軸結構,其中極軸是軸可動,軸承不可動。通過步進 電機連線減速器帶動極軸轉動,連同電池板一起轉動,以抵消地球自轉。
俯仰角調節軸是軸不可動,軸承可動,軸通過軸套與極軸固定,隨極軸轉動,而通過軸承的轉動調節俯仰角,抵消赤緯夾角。在機械結構上採用兩根螺釘對頂的方式實現對俯仰角的調節,通過量角器確定赤緯角。如果需要進行高倍聚光對跟蹤精度提出更高要求,可以在俯仰角調節軸上安裝電機來帶動軸套轉動,實現二維跟蹤。
極軸與地平面的夾角也就是安裝角,應與當地緯度角相同。該角度由設計決定,加工成型後不再改變,如有偏差,可通過調節底座的安裝角度進行補償。
機構頂部可以安裝電池板,也可以安裝聚光機構。機構機械簡圖如圖3所示。
特點
跟蹤裝置的一軸指向天球北極,即與地球自轉軸相平行,故稱為極軸;另一軸與極軸垂直,稱為赤緯軸。工作時電池板繞極軸運轉,其轉速的設定與地球自轉角速度大小相同方向相反用以跟蹤太陽的時角變化;電池板繞赤緯軸作俯仰轉動是為了跟蹤赤緯角的變化。這種跟蹤方式並不複雜,但在結構上電池板的重量不通過極軸軸線,極軸支承裝置的設計比較困難。
