
國內外研究現狀
在太陽能跟蹤方面,美國Biackace,在1997年研製了單軸太陽跟蹤器,完成了東西方向的自動跟蹤,而南北方向則通過手動調節,接收器的熱接收率提高了15%。1998年關國加州成功的研究了ATM兩軸跟蹤器,並在太陽能面板上裝有集中陽光的涅耳透鏡,這樣可以使小塊的太陽能面板矽收集更多的能量,使熱接收率進一步提高。2002年2月美國亞利桑那大學推出了新型太陽能跟蹤裝置,該裝置利用控制電機完成跟蹤,採用鋁型材框架結構,結構緊湊,重量輕,大大拓寬了跟蹤器的套用領域。在國內近年來有不少專家學者也相繼開展了這方面的研究,1992年推出了太陽灶自動跟蹤系統,1994年太陽能雜誌介紹的單軸液壓自動跟蹤器,完成了單向跟蹤。
太陽跟蹤的常用方法
跟蹤太陽的方法有很多,但不外乎採用這兩種方式:光電跟蹤和根據視日運動軌跡跟蹤。後一種跟蹤方式又可以分為雙軸跟蹤和單軸跟蹤。
光電跟蹤
國內常用的光電跟蹤裝置有:重力式光電跟蹤裝置、電磁式光電跟蹤裝置、電動式光電跟蹤裝置。這些光電跟蹤裝置都使用光敏感測器,如矽光電管,光電管靠近遮光板,調整遮光板的位置使遮光板對準太陽,矽光電池處於陰影區。當太陽西移時,遮光板的陰影隨之移動,光電管受到陽光直射,輸出一定值的微電流,發出偏差信號,經放大電路放大,控制跟蹤裝置對準太陽,完成跟蹤.光電跟蹤的優點是靈敏度高,結構設計較為方便。其缺點是受到天氣的影響很大。如果在稍長時間段里出現烏雲遮住太陽的情況,太陽光線往往不能照到矽光電管上,導致跟蹤裝置無法對準太陽,甚至會引起執行機構的誤動作。下面簡要介紹一下太陽能電池板的光電跟蹤經常用到的兩種方法。
1、太陽能電池板光強比較法
把兩塊完全相同的太陽能電池板按照一定的角度連線成“人”字型,它們既用作光電轉化的電池,也起光敏器件的作用。太陽光垂直照射地面時,兩塊電池板上得到的太陽光的能流密度完全相等,產生的光電流大小相等,此時控制它們方位的電動機不工作。入射太陽光與地面的夾角改變時,如果甲電池板得到太陽光的能流密度大於乙電池板得到的能流密度,則甲電池板產生的光電流強度就大於乙電池板的光電流強度,利用這一信號驅動電動機轉動,使得電池板與太陽光的夾角同光垂直於地面時完全相同。其優點為調節較為精確,電路也比較簡單,但兩個電池板之間的夾角始終存在,永遠無法達到真正意義上的垂直。
2、光敏電阻光強比較法
利用光敏電阻在光照時阻值發生變化的原理,將兩個完全相同的光敏電阻分別放置於一塊電池板東西方向邊沿處的下方(光與電池板垂直時一半可接收光,一半在下邊)。如果太陽光垂直照射太陽能電池板時,兩個光敏電阻接收到的光照強度相同,所以它們的阻值完全相等,此時電動機不轉動。當太陽光方向與電池板垂直方向有夾角時,接收光強多的光敏電阻阻值減小,驅動電動機轉動,直至兩個光敏電阻上的光照強度相同。其優點在於控制較精確,且電路也比較容易實現。
視日運動軌跡跟蹤
1、單軸跟蹤
單軸跟蹤一般採用以下三種跟蹤方式:傾斜布置東西跟蹤;焦線南北水平布置,東西跟蹤;焦線東西水平布置,南北跟蹤。這三種方式基本上都是單軸轉動的南北方向或東西方向跟蹤,工作原理基本相似。以第三種跟蹤方式為例,闡述單軸跟蹤的原理。圖1是這種跟蹤方式的原理。跟蹤系統的轉軸(或焦線)系東西方向布置。然後根據太陽赤緯角的變化使柱形拋物面反射鏡繞轉軸作俯仰轉動,以跟蹤太陽。採用這種跟蹤方式時,一天之中只有正午時刻太陽光與柱形拋物面的母線相垂直,此時熱流最大。而在早上或下午太陽光線都是斜射,所以一天之中熱流的變化比較大。採用單軸跟蹤方式的特點是結構簡單,但是由於入射光線不能始終與主光軸平行,從收集太陽能來說並不理想。如果能夠在太陽高度和赤緯角的變化上都能夠跟蹤太陽就可以獲得最多的太陽能,全跟蹤即雙軸就是根據這樣的要求而設計的。
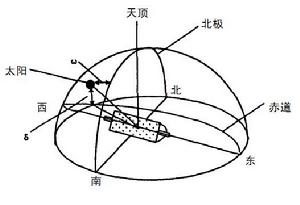 圖1 焦線東西水平布置,南北追蹤
圖1 焦線東西水平布置,南北追蹤2、雙軸跟蹤
雙軸跟蹤又可以分為兩種方式:極軸式全跟蹤和高度角—方位角式全跟蹤。極軸式全跟蹤原理如圖2所示。聚光鏡的一軸指向天球北極,即與地球自轉軸相平行,故稱為極軸。另一軸與極軸垂直,稱為赤緯軸。工作時反射鏡面只須繞極軸用與地球自轉角速度大小相同方向相反的固定轉速,以跟蹤太陽的視日運動。此外再按照季節的變化間斷地將反射鏡圍繞赤緯軸作俯仰轉動以適應赤緯角的變化。這種跟蹤方式並不複雜,只是反射鏡的重量並不通過極軸軸線,使極軸支承裝置的設計比較困難。
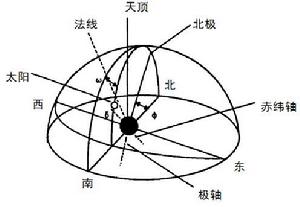 圖2 極軸式跟蹤
圖2 極軸式跟蹤自動跟蹤裝置結構
自動跟蹤裝置由感測器、方位角跟蹤機構、高度角跟蹤機構和自動控制裝置組成。方位角跟蹤機構由電源、方位角感測器、放大器、執行器組成。執行器由電機和傳動齒輪組成。方位角感測器由外殼與安裝在外殼內的一對光電二極體組成。高度角跟蹤機構由高度角感測器、放大器、執行器組成。執行器包括電機和傳動齒條。高度角感測器的一對光電二極體與方位角感測器和照度感測器的光電二極體安裝在一個感測器殼內,見圖3。控制單元由運算放大器、電晶體和繼電器組成,並與照度感測器、方位角和高度角感測器及驅動電機連線。
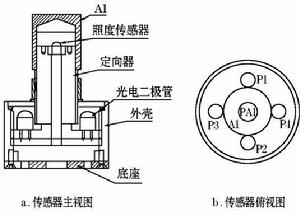 圖3 感測器結構圖
圖3 感測器結構圖感測器部分包括跟蹤感測器和照度感測器。感測器由外殼和安裝在外殼內的5隻2 CU1B光電二極體和指日棒組成。其中方位角的一對光電二極體左右(P3P4)對稱安裝在指日棒A1的兩側,它主要檢測太陽由東往西視運動的偏轉角度。高度角的一對光電二管與方位角的一對光電二極體成90°角,上下(P1P2)對稱安裝在指日棒A1的兩側,用來檢測太陽的視高度。輻照度感測器的一隻光電二極體安裝在指日棒的頂端,用於檢測太陽的輻射強度。感測器安裝在與太陽能集成器開口平面相平行的基件上。
自動跟蹤工作原理
自動跟蹤裝置是用來跟蹤太陽,使太陽能集能器的主光軸始終與太陽光線相平行,當太陽光線發生傾斜時,感測器輸出傾斜信號,該信號經放大後送入控制單元,控制單元開始工作,指示執行器動作調整太陽能集能器,直到太陽能集能器對準太陽。
感測器
跟蹤感測器是用來檢測太陽的方位角和高度角,只要太陽光線與太陽能集能器的開口平面不是90°,感測器就輸出偏差信號。照度感測器是用來檢測太陽的輻照強度,當太陽的輻照度低於或高於工作照度時就輸出關機或開機信號。如果太陽的輻照強度低於工作照度,則控制單元不工作,放大器和執行器的工作電源不接通,執行器不工作;當太陽輻照強度達到工作照度時,控制單元開始工作,執行器啟動執行。
方位角跟蹤過程
當太陽光線以與感測器底座垂直的方向照射到感測器上時,即太陽光線與太陽能集能器開口平面垂直時,兩個光電二極體接收到的光照度相同,當太陽光偏離垂直方向時,不管向哪個方向偏離,兩個光電二極體接收的照度都會出現差值,這就是偏離信號。該信號經放大後送入控制單元,這時控制單元開始工作,啟動自動跟蹤裝置調整太陽能集能器的角度,直到太陽能集能器對準太陽,實現了對太陽由東往西的自動跟蹤。方位角感測器還有自動搜尋太陽的功能,每天晚上當太陽光輻照度低於工作照度時,太陽能集能器自動跟蹤裝置停止工作,開口朝向西。當第二天早晨太陽的輻照度達到工作照度後自動跟蹤裝置自動開機,太陽能集能器就會自動轉向太陽。因此,方位角感測器的視野不應小於180°。
高度角跟蹤過程
當太陽光線與指日棒的軸線平行照射時,二個光電二極體接收的輻照度是相同的,無信號輸出;當太陽光線發生傾斜時(太陽上升或下落),兩個光電二極體接收的輻照度出現差值,這就是高度信號。該信號經放大後送入控制單元,與方位角感測器同理,當控制單元接收到高度信號後,高度角控制單元即開始工作,調整太陽能集能器的傾斜角度,使太陽能集能器在南北方向上跟蹤太陽,直到太陽能集能器對準太陽。自動跟蹤裝置使用的電源為太陽能電源或市電供電的直流穩壓電源,兩種電源可以切換,電源電壓為6V。以保證裝置必要的供電容量,太陽能電源由矽光電池PBAT和蓄電池BAT組成。
行業展望
目前制約太陽能發電的最大瓶頸是太陽利用率低,雖然通過對太陽自動跟蹤在很大程度上提高了太陽能的利用率,但各種跟蹤方式均存在一定的適用性和局限性。所以太陽能電池板自動跟蹤系統還需要更進一步的完善,還具有廣闊的研究前景和發展空間。由於光伏電池的輸出特性是非線性的,易受周圍環境因素的影響,使得系統的跟蹤精度很難提高,且結構較為複雜,但隨著現代科技的迅速發展,太陽能自動跟蹤技術的機構簡化和跟蹤精度的提高將成為必然的發展趨勢。
