
特點
撲翼是一種模仿鳥類和昆蟲飛行,基於仿生學原理設計製造的新型飛行器類型的重要結構。該類飛行器若研製成功,那么與固定翼和鏇翼飛行相比,它便具有獨特的優點:如原地或小場地起飛,極好的飛行機動性和空中懸停性能以及飛行費用低廉,它將舉升、懸停和推進功能集於一撲翼系統,可以用很小的能量進行長距離飛行,因此更適合在長時間無能源補充及遠距離條件下執行任務。自然界的飛行生物無一例外地採用撲翼飛行方式,這也給了我們一個啟迪,同時根據仿生學和空氣動力學研究結果可以預見,在翼展小於15cm時,撲翼飛行比固定翼和鏇翼飛行更具有優勢,微型仿生撲翼飛行器也必將在該研究領域占據主導地位。
生物飛行能力和技巧的多樣性多半來源於他們翅膀的多樣性和微妙複雜的翅膀運動模式。鳥類和昆蟲的飛行表明,仿生撲翼飛行器在低速飛行時所需的功率要比普通飛機小的多,並且具有優異的垂直起落能力,但要真正實現像鳥類翅膀那樣的複雜運動模式,或是像蜻蜒等昆蟲那樣高頻撲翅運動非常困難,設計仿生撲翼飛行器所遇到的控制技術、材料和結構方面等問題仍是一難題,但將這種概念用機械裝置去實現,本身並不是決定性的,關鍵是在於人類要去不斷的嘗試。
仿生撲翼飛行器通常具有尺寸適中、便於攜帶、飛行靈活、隱蔽性好等特點,因此在民用和國防領域有十分重要而廣泛的套用,並能完成許多其他飛行器所無法執行的任務。它可以進行生化探測與環境監測,進入生化禁區執行任務;可以對森林、草原和農田上的火災、蟲災及空氣污染等生態環境進行實時監測;可以進入人員不易進入地區,如地勢險要戰地,失火或出事故建築物中等;特別在軍事上,仿生撲翼飛行器可用於戰場偵察、巡邏、突襲、信號干擾及進行城市作戰等。
發展歷史
眾所周知,早在中國西漢時代就曾有人來模仿鳥的飛行,世界上第一架按技術規程設計的撲翼機圖紙出自著名畫家達文西之手,它是根據鳥類飛行機理進行設計的,至今仍完好地保存在博物館內。但過了300多年後,科學家們才重新開始考慮撲翼機,並把它作為一種飛行器來研究。在19世紀中期,由考夫曼、英國人哈爾格萊夫和德國人李林塔爾對撲翼機理論所作的研究及實踐成為撲翼發展史上重要的里程碑。
20世紀初,俄羅斯科學家和設計師們在這一領域內取得了重大突破,但鑒於知識背景,當時的撲翼飛行器也不能算理想的飛行器。一系列的失敗迫使科學家們重新進行計算設計,通過試飛實踐和所積累的理論資料,科學家們看到了許多問題,如:機翼煽動時效果不明顯,並未產生理想的升力和推力。另外,關鍵一點是科學家們認識到之前那些僅靠人體自身肌肉的力量來驅動的撲翼飛行器是無法實現持續飛行的。由此至20世紀中後期,人類歷經艱辛才發明了撲翼滑翔飛行器和動力撲翼飛行器。前者仍由人發出功率,故不能獨立起飛,只有獲得必要的高度才能滑翔飛行,在無上升氣流情況下,要靠駕駛員人力煽動機翼,以減緩某一時刻的下降速度:後者當時則利用了發動機來完全或部分取代人力。在1986年,美國人波拉·麥克里迪在動力撲翼飛行器上取得過一定成績,但須要加裝大傳動比的減速器才能使發動機滿足撲翼工作要求,相比之下,蒸汽發動機、電動機等更適合撲翼飛行器使用。
國內外研究現狀
國外
從微型撲翼飛行器的概念提出以來,比較大型的撲翼機及其有關空氣動力學方面的研究逐漸成為各大研究機構的研究熱點。由於微撲翼機的種種優良性能和使用價值,在 DARPA 的資助下一些國外的研究機構,近年來對於其有關的研究取得了一定意義上的成果。目前美國在這方面的研究總體上處於世界比較領先的水平。較典型的微型撲翼飛行器有加利福尼亞理工學院研製的“Microbat”和斯坦福研究中心(SRI)研製的“Mentor”。其次還有美國喬治亞理工學院的“Entomopter”微型撲翼飛行器、荷蘭Delft 大學的“Delfly”微型撲翼飛行器和以色列航空工業公司的“機械蝴蝶”等。
 撲翼
撲翼(1) Microbat 微型撲翼飛行器:加州理工學院與 Aero Vironment 公司等單位共同研製的“Microbat”微型撲翼飛行器是最早的電動微型撲翼飛行器,它是一種仿生飛行方式的微型撲翼飛行器,它機翼的形狀是模仿昆蟲的翅膀,用微型機電系統 MEMS(Micro Electro Mechanical System)技術加工製作成的。它通過微傳動機構將微電機的能量轉變為撲翼機構的撲動,從而產生升力與推力並克服自身重力與阻力飛行。該機目前有四種不同的原理樣機,首架持續飛行了 9s;第二架以可充式鎳電池為動力源,持續飛行了 22s;第三架原型機增加了無線電遙控設備,持續飛行了 6min17s;通過進一步的改進,第四架原型機巡航時間達到了 22min45s。“Microbat”翼展只有 23cm,重僅 14g,撲翼頻率為 20Hz 左右,該飛行器可攜帶一台微型攝像機。
 撲翼
撲翼(2) Mentor 微型撲翼飛行器:“Mentor” 微型撲翼飛行器是由多倫多大學和美國斯坦福研究中心(SRI)合作研究的,它的最大翼展在 15cm 左右,重約 50g,它有四片機翼,機翼由一種電致伸縮的聚合物人造肌肉 EPAM(Electrostrictive PolymerActuated Muscle)驅動。
 撲翼
撲翼(3) Entomopter 微型撲翼飛行器:“Entomopter” 微型撲翼飛行器是由美國喬治亞理工學院(GTRI)、英國劍橋大學和 ETS 實驗室共同研製的,重 50g,有效載荷 10g,它的動力裝置是基於一種往復式化學肌肉 RCM(Reciprocating Chemical Muscle)技術的微型仿生撲翼飛行器,往復式化學肌肉主要的特點是結構緊湊,能量轉換效率高。該飛行器的機翼類似於蝴蝶的翅膀,其尾部裝有天線用於增加平衡;腿 以使其著地和移動,還可存放飛行所需的燃料。它的翼展為 10in,翅膀撲動頻率為 10Hz,機翼的撲動是自主、均衡、不受控制的,可實現懸停。
 撲翼
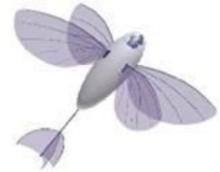
撲翼(4) Delfly 微型撲翼飛行器:荷蘭的 Delft 大學研製的“Delfly” 微型撲翼飛行器,它的外觀看起來像一隻大蜻蜓,其機翼由兩對翅膀組合而成,其質量為17g,具有X翼結構和V型尾翼,可以自由越過障礙物並進行慢飛,它的翼展35cm,根弦12cm。它的動力裝置是 3.7V 的鋰電池,以 1.8m/s 的速度飛行了 12min。
 撲翼
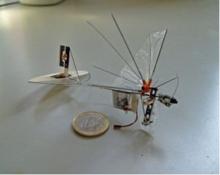
撲翼(5) “機械蝴蝶”:“機械蝴蝶”由以色列航空工業公司的微型機器人實驗室研製而成,它是一款新型機器昆蟲,“機械蝴蝶”翼展 20cm,重 12g,它的機載設備有發動機、感測器、通訊系統及轉向系統,它可以模擬蝴蝶上下拍動翅膀推動其前進。
國內
與國外相比,國內在仿生微型撲翼飛行器的研究方面起步較晚。由於微型撲翼飛行器套用前景廣泛、使用價值高,微型撲翼飛行器的研究在國內也成為了熱門話題。在國內,主要有西北工業大學、南京航空航天大學、北京航空航天大學、清華大學等機構正在進行有關仿生微型撲翼飛行器方面的研究,雖然取得了一些成果,但與國外相比還是有一定的差距。
 撲翼
撲翼由南京航空航天大學昂海松指導,設計製作的“黃鶯”微小型可控撲翼飛行器,翼展為 24cm,重量為 38g,能在空中飛行 6min,飛行高度可達 50m,可遙控飛行的航程達 2000m,由自行研製的重量不到 1g 的超微型無芯舵機控制。具有噪聲小、飛行穩定、控制靈活等優點。
 撲翼
撲翼西北工業大學的方宗德等人,以鳥類的飛行參數為基礎進行統計分析,擬合出了仿鳥撲翼飛行的公式,並根據這些公式對仿生微撲翼飛行進行了初步設計,最後製作出了仿鳥微撲翼飛行器樣機,全機重約 16.5g,翼展 230mm,撲翼頻率 10.5Hz,可自由飛行 15~21s。該機的驅動機構採用的是聚合物鋰電池和微型直流電動機驅動,它的機架採用的是碳纖維,機翼採用的是聚酯薄膜柔性機翼。
 撲翼
撲翼西北工業大學的高廣林等人研製的 ASN-211 自主飛行微型撲翼飛行器,全機僅重 220g,翼展為 600mm,最大飛行速度可達 6m/s-10m/s,飛行高度達 20m-200m。它的驅動方式採用的是電池供電,該機實現了一定量的負載,在它的機腹下方載有微型攝影機。該飛行器主要用於偵察,在同類型的研究中,ASN-211 處於比較領先的水平,已經實現了自主起飛、自主航行,具有較強的抗風能力,並且已經完成了搜救登山遇險者的工作、城市交通執勤管理工作和機場驅鳥等任務。
總的來說,國內在研究微型撲翼飛行器方面主要存在著續航時間短(如“黃鶯”)或體積相對較大(如“ASN-211”)等方面的問題。“ASN-211”雖然完成了許多任務,但是因為其體積相對較大,用於軍事方面目標較為明顯。如何微小化,以及利用較少的動力提供較大的升力顯得尤為重要。
