
簡介
目標識別是圖像處理領域與機器視覺領域的一個基礎課題,實際上人們經常在學習、工作生活中利用眼睛與大腦識別一些物體。隨著二十世紀40年代電腦的發明和人類對人工智慧技術的不斷深入研究,人們迫切希望通過圖像感測器扮演眼睛的角色,藉助於計算機來代替或輔助人類進行腦力勞動。因此,國內外的研究機構或學者在目標識別這個領域做了很多研究,目標識別技術迅猛發展,並有很多研究成果套用於實踐當中。近年來,隨著國內外學者對圖像處理技術和模式識別技術的深入研究,使得利用機器視覺的方法識別地面目標(車輛、行人或人臉識別)成為了可能。而紅外成像技術的出現,也使很多學者的研究重心從可見光圖像目標物體的識別轉移到紅外圖像目標物體的識別上。
地面目標識別過程主要包括:圖像樣本採集、樣本預處理、訓練分類器、目標識別幾個步驟。
圖像樣本採集
紅外感測器地面目標識別
紅外成像技術的起源可以追溯至 20 世紀中葉,而它的抗干擾性好、被動工作和目標識別能力強的特點,成功的彌補了可見光感測器在極端惡劣條件下不能很好成像的缺點,使得紅外圖像處理技術成為當今信息處理中的關鍵技術,並在行人檢測、車輛識別和航空測量等領域得到充分利用。目前,國內外很多高校、研究機構和公司都對基於紅外感測器的地面目標識別技術進行了大量研究。
可見光圖像感測器地面目標識別
傳統的監控設備都是基於可見光感測器的,這些設備在光照、天氣良好的條件下可以採集到清晰的畫面,但是在夜晚、雨雪天氣和濃煙濃霧遮擋的情況下,它們就很難獲取有效的目標信息了。而往往在這些極端條件下的套用才是需要關注的重點,因此只使用單一的可見光感測器已經不能滿足需求。
機載雷射成像雷達系統
在機載雷射成像雷達系統中,雷射成像雷達系統安裝在飛行器的水平平台上。雷射成像雷達通過雷射波束掃描的方式測量飛行器到地面上雷射光斑中心點的斜距;在飛行器飛行過程中,掃描光學系統按照固定的下視角、以一定的頻率進行等角度的光束輸出,完成雷射束的橫向掃描,得到一行掃描數據,而雷射束的縱向掃描則通過飛機器的航向飛行實現;通過橫向掃描和縱向掃描可以得到飛行器到下方多行地形採樣點之間的距離,進而構成飛行器下方地形的距離圖像。
圖像預處理
圖像是指能在人的視覺中產生視覺印象的客觀對像,是對現實物體的真實反映,是人們認知世界的重要途徑。使用不同的感測器採集圖像會得到不同的圖像,當使用 CCD 相機採集圖像時我們會得到可見光圖像,當使用紅外熱像儀採集圖像會得到紅外熱象圖,多感測器地面目標識別就是利用特定的感測器在特定的套用場景下對目標成像,然後通過圖像處理和機器視覺的方法對目標物體進行檢測與識別。在這過程中,無論採集到的是可見光圖像還是紅外熱圖像往往都會含有部分噪聲,所以在進行圖像目標識別之前我們需要對圖像進行圖像灰度化、圖像去噪處理。在對圖像進行去噪預處理之後,需要使用運動目標檢測方法在圖像中提取目標所在區域等一系列處理。
地面目標識別分類算法
在進行地面目標進行識別的過程中,最關鍵一個步驟是構建目標分類器。從兩類模式分類技術的角度出發研究圖像序列中地面目標的識別問題,假設以車輛作為地面目標研究對象,所以需要構建車輛分類器。
分類是圖像識別中的關鍵問題,它通過訓練分類器,在特徵空間中完成不同類別的劃分,將特徵相似的樣本歸為一類。利用Haar-like特徵以及利用積分圖像快速計算特徵值,從大量的車輛樣本圖像中提取該特徵後,我們就要思考如何利用這些特徵構建分類器,這是地面目標識別系統中至關重要的一步。
 地面目標識別
地面目標識別目前用於車輛識別的分類器訓練算法主要有:支持向量機SVM、Ada Boost學習算法和神經網路,如表所示。
SVM 支持向量機
支持向量機具有很強的泛化性能,同時,它主要是來解決一個凸規劃問題,其求得的局部最優解也就是全局最優解,能夠有效避免過度學習的情況。支持向量機算法訓練分類器基本原理可以理解為:將待學習的樣本數據使用某種非線性函式投影至高維空間,然後通過在這個空間裡建立分類超平面,最終使所有樣本在這個空間裡可分。投影函式是由待分類樣本組成低維向量和它們所構成特徵空間的內積確定,並且這個內積也可由樣本空間的某種核函式替換,如此就能夠快速的構造特徵空間中的分類超平面,從而避免“維數災難”,因此,支持向量機對高維特徵的分類問題具有十分優異的性能。
Ada Boost 算法理論
Ada Boost 算法是機器學習領域又一種重要的特徵分類算法,已被廣泛套用於人臉檢測和目標識別。它的主要原理是通過疊代的方式,對同一個訓練樣本集進行疊代訓練,每一輪訓練都形成弱分類器,然後將形成的弱分類器級聯,形成最後的強分類器。簡單來說如果用一個特徵分類效果不好,那可以多找幾個特徵,把這幾個特徵級聯起來就可得到逐漸增強的分類器。
改進的 Ada Boost 算法
因為 Ada Boost 算法對分類錯誤的樣本進行加權處理,在下一輪的疊代訓練中這些樣本將被重點學習分類,所以 Ada Boost 算法有著較強的分類能力。可是,一旦分類訓練中出現大量的錯分樣本,那么該算法就會著重處理這些難以分類的樣本,這樣就降低了 Ada Boost 算法的分類性能。為了解決這個問題,Friedman 等人提出 Gentle Ada Boost 分類算法,簡稱 GAB,GAB 算法有著較高的穩定性,並且弱分類器的權重一直是1。
地面目標庫的建立
要識別地面目標,需要對地面目標進行分類學習。如前文介紹使用Ada Boost 疊代算法根據目標圖像的 Haar-like 矩形特徵進行分類學習,需要大量包含目標的正例樣本和不包含目標的反例樣本,此外為了評估分類器的性能還需要很多測試樣本,因此針對可見光和紅外圖像分別建立了地面目標庫。
由於圖像 Haar-like 矩形特徵的提取容易受到噪聲、光照強度以及紅外輻射強度不一的干擾,因此在提取特徵之前需要對樣本進行預處理。預處理過程主要包括(1)使用平滑濾波對樣本進行去噪;(2)將彩色圖像樣本做灰度變換轉化為灰度圖像;(3)圖像灰度歸一化。
分類器的訓練
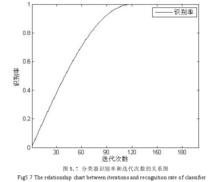
準備好正例樣本和反例樣本後,就需要運用疊代算法對樣本進行分類學習。整個訓練過程是在PC 機上訓練一定時長左右,當疊代次數達到一定時,由每輪疊代生成的弱分類器級聯成的強分類器將不同類別樣本完全分開,停止訓練。
分類器對訓練樣本的識別率和疊代次數的關係如下圖所示。
 地面目標識別
地面目標識別套用
人們對智慧型檢測和目標識別的技術需求越來越大,汽車輔助駕駛、智慧型交通監控等領域的核心是自動檢測和識別某些套用場景內的存在的地面目標。
軍事上,地面目標識別技術是精確制導武器的關鍵技術。現代化戰爭要求精確制導武器能夠準確打擊目標、智慧型攻擊目標、提高發射平台的生存能力,該技術是實現這些目標的重要前提。
