同步狀態的搜尋與接收系統定時
巴克碼的檢測
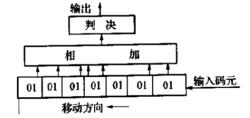 圖1
圖1同步狀態的搜尋是在對巴克碼檢測的基礎上實現的。我們採用7位移位暫存器、加法器和比較器實現巴克碼的檢測。實現原理如圖1所示。
 圖2
圖2根據7位巴克碼識別器原理圖,採用軟體仿真,輸入數據流是偽隨機的序列,得到仿真波形如圖2所示。從圖中可以看出,巴克碼到來時輸出一個尖脈衝,在本系統中此尖脈衝作為同步標誌脈衝,通過同步標誌脈衝來實現對狀態機工作狀態控制。
同步狀態轉移分析
在接收端的同步碼流中,當檢測到幀同步碼組時系統就會輸出一個同步脈衝。因為碼流中總含有與幀同步碼字相同的碼組,如果這種情況發生了就會產生一個假的同步信號,稱為假同步。同樣,系統由於受外部的干擾,同步碼組的某一位或者幾位出現傳輸錯誤,在接收端就檢測不出這樣的同步碼組,系統判為失步,這叫假失步。穩定的同步系統應該儘量減少以上兩種情況的發生。通常採用前方和後方保護電路來減免這種情況的發生。
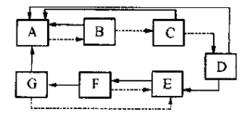 圖3
圖3通過以上分析,把同步過程分為同步態和捕捉態。在接收端,一旦檢測到幀同步碼組,則用它對接收定時系統復位。然後經過三幀校核,如仍能檢測出幀同步碼組,就確定系統已經進入同步態;如不存在幀同步碼組,則判斷開始檢出的是假幀同步信號,系統再以下一個檢出的幀同步碼組開始,重新進行捕捉。系統已經處於同步態時,為了避免出現假失步,也要進行三次校核,如果連續四次丟失同步信息,系統就進入捕捉態。狀態轉移如圖3 所示。
圖3中,虛線箭頭表示在規定時刻沒有捕捉到同步碼,實線箭頭表示在規定時刻捕捉到同步碼。1,2,3,4 為同步態,其中2,3,4 為校核狀態,5,6,7 為捕捉校驗態。
下面以同步校驗態為例說明狀態的轉移情況,當系統進入同步狀態1 後,在下一個定時時刻沒有捕捉到同步碼,這時系統進入2 狀態,如果在2 狀態下,下一個定時時刻檢測到了同步碼,判為假失步,系統重新回到同步態1;如果在定時時刻沒有檢測到同步碼,則系統進入3 狀態;在3 狀態的下一個定時時刻檢測到了同步碼,系統返回同步態1;同理,沒有檢測到同步碼字,系統進入4 狀態。其它狀態之間的轉移也可以在圖3中分析得到。
狀態機的控制與編碼
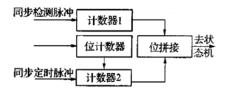 圖4
圖4狀態轉移的控制採用兩個狀態計數器和一個位計數器來實現。由巴克碼識別器輸出的同步檢測信號作為狀態計數器1的觸發信號,每來一個同步檢測信號,狀態計數器1 就加1,同時輸出同步脈衝。
由位計數器和同步定時脈衝作為狀態計數器1的觸發信號。位計數器以同步檢測脈衝為基準,第一個同步檢測脈衝到來時,位計數器置位,並產生同步定時脈衝。每當位計數器計到同步脈衝應該出現的時刻,這時無論實際的同步檢測脈衝是否出現,都會輸出一個同步定時脈衝。這樣兩個狀態計數器的結果就可能不同,只有在同步檢測脈衝沒有丟失時才是一致的。當同步檢測脈衝丟失時,兩個狀態計數器的結果就會有差別,這種差別反應了同步狀態機各個狀態的變化。因此,如圖4 所示,兩個狀態計數器的輸出經過位拼接後作為同步狀態機的輸入 ,以此來實現對狀態機狀態轉移的控制。
狀態編碼
狀態機是由組合電路和時序電路構成的硬體時序電路。狀態的轉移取決於當前的狀態和狀態機的輸入,這種狀態機為米里型狀態機;狀態的轉移只取決於當前狀態的稱為莫爾型狀態機。莫爾型狀態機可以看作是米里型狀態機的一個特例。
