背景
最早的優先控制是1967年在洛杉磯所做的公交信號優先控制實驗。在現實巨大需求和美好預期的驅動下,公交信號優先控制理論逐漸吸引了交通控制領域、公共運輸領域乃至交通設計和交通安全領域眾多研究者的注意。早期公交信號優先控制研究傾向於將公交信號優先(bus signal priority)與強制信號優先(priority and preemption)歸結為同一類問題。隨著研究的深入,二者的區別逐漸被指出NTCIP(National TransportationCommunications for ITS Protocol)1202第二版給出了公交信號優先的定義:“在信號控制交叉口給予公車輛相對於其他車輛的優先權,這種優先不應導致相應的信號機脫離正常運行狀態”。而強制信號優先的定義為“交通信號從正常狀態切換到特殊狀態,以滿足緊急救援車輛、軌道交通等的通行,即需要中止正常的信號運行來提供特殊信號服務”l司。這兩個定義從本質上體現了優先權思想:一般公車輛的優先權大於普通社會車輛,緊急車輛(緊急救援車輛、軌道交通等)的優先權最高。
 優先控制
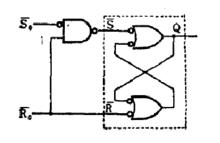
優先控制復位優先觸發器
(1)同時向置位端和復位端進行愉入時,能使復位輸入優先起作用的觸發器,叫做復位優先觸發器。
(2)在發生誤操作或電路發生異常等情況下,它將能作為使觸發器的置位端和復位端同時發生輸入的安全措施。
 優先控制
優先控制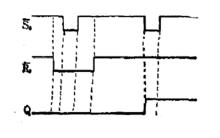 優先控制
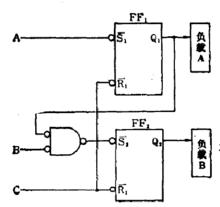
優先控制觸發器之間的優先功能
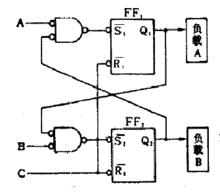
(1)運用復位優先觸發器的構思,可以使觸發器之間具有優先工作的功能。
(2)圖中所示的電路具有使負載A的馭動愉入優先的功能。即在驅動負載A以後,即使有驅動負載B的信號輸入,負載B也不能驅動。
 優先控制
優先控制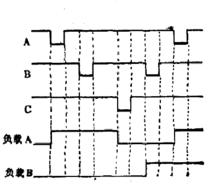 優先控制
優先控制並聯優先電路
(1)任一個最早加進來的輸入信號被優先採用,以後,其他輸入端子既使有輸入,也不再起作用。
(2)可套用於電功機的正、反向控制電路等。
 優先控制
優先控制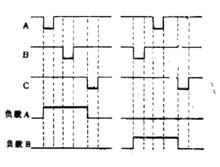 優先控制
優先控制順序控制
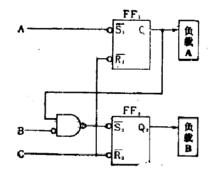
(1)是使各種電路按照某種順序進行工作的方法。
(2)圖示的電路,必須按照A→B的順序輸入,否則觸發器不能工作。
(3)可用於傳送帶的順序啟動、暖風機的風扇和加熱器的啟動電路等。
 優先控制
優先控制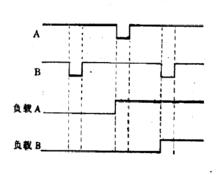 優先控制
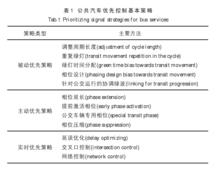
優先控制優先控制的分類
結合相應觀點和研究成果,將優先控制策略分為被動優先策略(passive priority strategies)、主動優先策略(activepriority strategies)和實時優先策略(real-timeprionty strategies),見表,
優先控制這一分類方法被廣泛接受。進一步對三種優先策略做出界定:
1)被動優先。針對離線方案進行最佳化,不考慮交叉口是否有公車輛到達,同時不需要車輛檢測/優先申請生成系統。
2)主動優先。為檢測到的特定車輛提供優先,包括相位延長、提前激活相位、公車輛專用相位等多種方法。
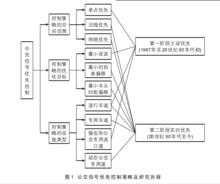
3)實時優先。基於實時檢測數據提供信號優先的同時,以某一指標為目標最佳化方案。公交信號優先控制策略還可以依據控制範圍、最佳化目標及控制策略依託的設施類型進行劃分,見圖1。
 優先控制
優先控制被動優先
直觀判斷,被動優先在降低公車輛延誤上應有一定作用,但以加拿大多倫多皇后大道為案例、利用下RANSYT一7F模型進行的研究表明,被動優先在這一點上並沒有明顯作用。認為這是由下RA N SYT-7F模型本身的局限性以及假定車輛固定時刻、固定間隔到達車站決定的。而在實際運行中,受停靠時間、道路狀況等影響,公車輛到達車站的時刻是隨機的。研究一種被動優先的公交信號周期最佳化模型,但沒有描述模型的穩定性。給出一種利用被動優先和主動優先策略進行幹線協調控制的方法,指出公車輛流量較大且運行狀態穩定時,被動優先能實現較好的控制效果。研究了基於時空最佳化和發車頻率的被動優先方法,將被動優先擴展到交叉口時空資源組合最佳化和控制與靜態調度的協調層面。將被動優先策略與左轉相位設計及公交停靠站的布局關聯起來進行研究。目前尚無文獻給出在常見的信號配時軟體(如PASSER, MAXBAND,SYNCHRO或SOA P等)中整合被動優先策略的方法。
相對於主動優先和實時優先策略,國外被動優先策略的研究成果較少。這與歐洲特別是美國的套用背景即公車輛流量較小有關,因為被動優先策略在流量較小時適應性較差。近年來,在中國等公車輛流量較大的國家和地區,被動優先策略得到了一定發展。
主動優先
主動優先策略隨著公交信號優先控制研究的誕生而出現,是早期研究的重點,有很多研究成果。提出的無條件優先策略能使公車輛行程時間縮短25%,但在公車輛發車頻率較低的情況下,相交道路車輛延誤增加。對加州3.8英里(約6.1 km)道路上9個信號控制交叉口的公交信號優先控制系統分析發現,公車輛行程時間減少23%。通過建立微觀仿真模型研究了5種優先控制策略:
1)僅有綠燈延長;
2)綠燈延長加紅燈縮短,無恢復算法;
3)綠燈延長加紅燈縮短加恢復算法;
4)紅燈縮短,無恢復算法;
5)紅燈縮短加恢復算法。
提出一種新方法評價主動優先控制系統的效果,創造性地引入了感受延誤(perceive delay)和預計延誤(budgeted delay)兩個參數,在公交信號優先控制評價中產生了很大影響。感受延誤是實際延誤在心理上的度量值,預計延誤定義為行程時間(或延誤)的平均值與標準差的和。研究發現,公車輛預計延誤(而非平均延誤)的降低是公交信號優先控制更加可行的原因,即使公車輛平均延誤有所增加,也可提供較好的服務(即延誤的波動性減小)。假設公車輛到達交叉口時服從泊松分布,同時將綠燈時間的起始時刻作為變數,構建公交優先條件下交叉口公車輛延誤解析模型,結果表明:調整總的信號配時方案可提高公交優先的效益;公交優先方向社會車輛流量顯著大於相交方向社會車輛流量時,公交信號優先帶來的效益並不明顯;公車輛流量越大,效益越明顯。提出了實行公交信號優先控制的4個標準:
1)人均延誤降低;
2)尖峰時段公車輛流量至少為1015輛 ;
3)全天公車輛雙向流量不小於100輛;
4)相交道路綠燈時間在滿足最小綠燈時間的前提下可適當減少。
使用UTCS/BPS模型,發現公交信號優先控制帶來的效益受信號相位結構和公車站位置的約束:多相位信號使優先效益降低,隨著公交優先相位的增加,信號協調效益消失,車均延誤增加;公車站設定在交叉口下游時,有利於發揮公交信號優先效益。根據研究建議,在公交信號優先策略中引入了限制條件:僅當前一信號周期沒有提供優先信號時,後一信號周期才能提供,並指出實施公交信號優先時必須權衡獲得的效益與帶來的交叉口通行能力損失。是降低公交信號優先對非優先車流影響的典型研究。為了最佳化公交信號優先控制策略,後續研究逐漸考慮了交叉口上下游公車站影響、道路等級和功能、交通是否擁擠等因素。
20世紀90年代中期起,主動優先策略研究逐漸被實時優先代替,研究成果較少。公交信號優先也由絕對優先階段發展到相對優先階段。越來越多的研究者開始考慮以時刻表或車頭時距為依據的優先策略。從這一階段起,國內學者開始陸續發表公交信號優先控制策略的研究成果:研究了基於邏輯規則的控制方法,增加公交信號優先控制策略的多樣性;對主動優先控制邏輯作了改進。同時,公交信號優先控制策略的效益評價也得到了深入分析。
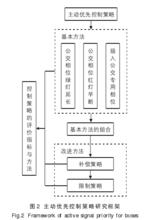
總體來看,主動優先控制策略圍繞基本方法及其改進方法進行研究,並試圖通過仿真和實踐評價控制策略的效果,其總體研究架構見圖2。引入補償策略和限制策略的目的在於降低公交信號優先對社會車輛的不利影響,對於單點交叉口非優先相位而言,這兩種策略會使社會車輛獲得一定的效益,但同時也使本信號周期的公車輛喪失獲得優先的機會。單點交叉口最佳化範圍的局限性使公交信號優先常常打斷交叉口間社會車輛的信號協調。同時,由於公交信號優先策略相對獨立,即在進行公交信號優先時較少考慮社會車輛的運行狀態,主動優先控制系統尚不能對公車輛與社會車輛的運行效益進行合理平衡與協調。主動優先控制策略的這些缺陷驅動了實時優先策略研究的開展。
 優先控制
優先控制實時優先
實時信號優先策略以研究為標誌性開端。使用元胞自動機模型預測車輛行程時間、排隊長度、飽和交通量以及信號運行狀態,但沒有考慮下一秒鐘決策對未來長期控制效果的影響,而僅僅是為下一秒作出最優決策。研究的SPPORT(Signal Priority Procedure forOptimization in RBI Time)程式基於用戶預先設定的交叉口請求綠燈事件的優先權列表運行,對幾套信號控制方案進行評價並從中找出最符合原定事件優先權的控制方案。由於SPPORT基於預先設定的優先權列表尋找方案,因而其生成的方案並非最優。
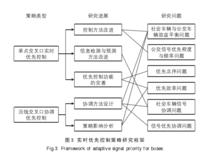
將自適應公交調度(adaptive transitoperation)策略和自適應交通控制(adaptive signalcontrol )策略同時進行套用研究。自適應控制以公車輛、社會車輛延誤費用和社會車輛停車費用組合為目標函式最佳化控制方案。指出影響公交優先策略選擇及其效益發揮的因素有路網結構和特徵、路網交通狀態以及公車輛發車頻率與運行特徵。研究了公車輛在交叉口的有條件優先方法,並在荷蘭Eindhoven實施,結果顯示,在絕對優先條件下社會車輛延誤成倍增長,但在有條件優先下卻沒有明顯變化。研究了整合公交信號優先控制功能的自適應交通控制系統框架,指出公交信號優先與整個信號控制系統融為一體時才更有效,集協調控制、單點交叉口控制和公交優先控制為一體的控制系統能顯著降低公車輛延誤,且對社會車輛影響較小。
優先控制的發展歷程
公交信號優先控制的研究歷程可分為兩個主要階段,即以主動優先為主的第一階段和以實時優先為主的第二階段。被動優先的研究在兩個階段中都有一些成果,但相對較少。
 優先控制
優先控制第一階段:1967年至20世紀90年代初
該階段的公交信號優先控制實驗為開端,以降低交叉口延誤為目標,主要針對混行車道(公車輛與社會車輛混行)研究單點交叉口主動優先策略,研究成果在歐洲及美國得到了一定套用。20世紀80年代,公交信號優先研究和實踐轉入低潮,其原因可歸結為:公交信號優先系統不能較好地滿足社會車輛需求,經常打斷社會車輛的信號協調,社會車輛受到顯著的不利影響。這一階段的公交信號優先策略獨立於社會車輛信號控制策略,且大多針對單點交叉口。研究結果沒有很好地解決信號優先程度、優先頻率等問題,沒能解決信號協調問題,也沒能在公車輛和社會車輛的運行效益間找到平衡點。車輛信息檢測手段及通信手段落後也是造成公交信號優先控制效益未能充分發揮的重要因素。
第二階段:20世紀90年代至今
進入20世紀90年代後,隨著交通擁堵加劇以及公交優先相關技術的發展,公交信號優先研究重新成為熱點。這一階段的研究主要從三方面展開:
①如何降低公交信號優先對社會車輛的影響;
②如何協調公交信號優先控制策略與社會車輛信號控制策略;
③如何將公交信號優先控制融入整個信號控制系統。
這一階段,公交信號優先策略的控制對象逐漸從單點交叉口轉向沿線相鄰交叉口群,控制目標逐漸從單純追求公車輛延誤最小轉向最小化性能指標(Performance Index,PI )值,或最小化公車輛時刻表延誤以及車頭時距偏移;控制方法由邏輯判斷轉向基於規則和最佳化方法;優先策略不再獨立於社會車輛信號控制,而是與社會車輛控制策略一起進行協調最佳化。該階段的研究一定程度上緩解了第一階段出現的問題,並推動了UTOPIA/SPOT , SU PPORT等一系列具有公交信號優先控制功能的系統研發和套用。
