
簡介
 人造肌肉的機器人手臂
人造肌肉的機器人手臂人造肌肉計算機是首次用人造肌肉來建造計算機,這樣它們能直接而緊密地嵌入人造肌肉設備中,讓這些設備像有了生命一樣靈活反應。雖然這種計算機還有很多堅硬部分,但本質上是彈性柔軟的,且能與傳統的計算方法相匹敵。這為開發智慧型型仿真假體和適應環境變化的柔軟機器人鋪平了道路。
結構
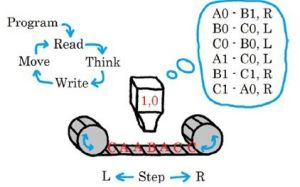
人造肌肉計算機仿照史蒂芬·沃爾弗拉姆的2,3圖靈機結構製成,有一個讀寫頭能閱讀存儲在帶子上的符號,然後根據該符號和自身狀態(0或1)按照編好的一套指令來確定下一步該寫入或存儲什麼。
2,3圖靈機是已知的最簡單通用機型,對人造肌肉材料來說非常理想。理論上只要13條肌肉,就能解決任何計算問題。
功能
 人造肌肉計算機
人造肌肉計算機1、人造肌肉能通過舒張和收縮,執行多種計算過程所涉及的機械運動。
比如肌肉把滑動子推到合適位置、編制指令表等。在演示例子中,肌肉舒張時會按下開關通電。目前(2013年)的人造肌肉計算機很大(約1立方米)也很慢(0.15赫茲),但在測試輸入時,能輸出正確的計算序列。
2、人造肌肉也能計算和“思考”。
通過感知、計算、移動,人造肌肉會讓這些設備適應複雜多變的環境,就像真正的肌肉那樣靈活反應。比如章魚,它們有極其靈巧的觸手,能以無限自由度操作。章魚解決這一問題是靠遍布手臂的分散式神經元。利用人造肌肉邏輯,將來也能讓機器人做到這一點。
發展
奧布賴恩打算將來把技術微型化,讓人造肌肉計算機運行更快、更便於攜帶;開發更持久耐用的材料;實現計算機整體軟化;開發模擬結構;造出具有內置計算機的軟體機器人控制器。
