基本思想
FSR協定基於一種“魚眼”(fusheye)技術,模仿魚眼的功能,通過對不同距離的節點採用不同的路由更新頻率,使得距離越近的節點,掌握的路由信息越準確。另外它的路由更新分組僅在鄰節點之間交換,減少了用於路由的控制開銷。
關鍵技術問題
1、魚眼技術
模仿魚眼的生理特徵,FSR協定採用了以下作法:一是劃分節點不同層次的魚眼範圍(scope of fisheye),二是在不同魚眼範圍內採用不同的路由更新頻率,由此維護遠近不同精度的路由信息。
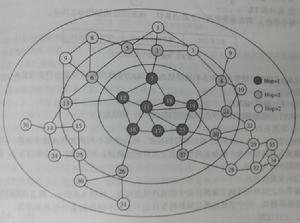 圖1-1 FSR協定的魚眼範圍
圖1-1 FSR協定的魚眼範圍節點i的魚眼範圍定義為從i出發,在N跳內可達的節點集合。如圖1-1所示,節點11有3個魚眼範圍:範圍1為節點11一跳可達的節點集合,範圍2為節點11兩跳可達的節點集合,範圍3為節點11多於兩跳可達的節點集合。魚眼範圍的層次數和半徑由網路的大小來確定。
FSR協定採用周期性傳送鏈路狀態信息分組的方法來更新路由表。魚眼範圍不同,路由的更新頻率也不同,魚眼範圍越小,其路由更新頻率越高,這樣可以大大地降低路由的開銷。目的節點距離自己的距離不同路由信息的精度也不相同,目的節點距離越遠,路由信息就越不準確。
2、路由分組的傳遞方法
FSR協定是一種鏈路狀態協定,網路中的節點間需要交換鏈路狀態信息分組,但是不同於普通的鏈路狀態協定。FSR協定的鏈路狀態信息分組僅在鄰節點之間交換,而普通的鏈路狀態協定採用洪泛的方法。
路由協定描述
設自組網的模型為無向圖G=(V,E),V為節點的集合,E為連線V中節點的無向邊。每個節點代表自組網中的一個無線移動設備,有唯一的標識符,傳輸範圍為R且有無窮的存儲空間。節點何以自主移動,改變速度及方向等。當兩個節點i,j之間的距離小於或等於傳輸範圍R時,i,j之間就形成一條無向邊(i,j);當節點i,j運動導致兩者之間的距離大於傳輸範圍R時,就需從圖G中刪除無向邊(i,j)。
1、信息種類
(1) 存儲的訊息
每個節點i都維護一個列表和三張表,如下所述。
1)鄰居列表A
為節點i的鄰節點列表
2)拓撲表TT
每個節點j,均在該表中有一個路由條目。該表的結構如圖1-2所示。
| 節點標識符j | 鏈路狀態LS(j) | 時間戳SEQ(j) |
圖1-2 FSR協定節點的拓撲表
LS(j)欄位中存儲節點j報告的鏈路狀態,SEQ(j)欄位中存儲節點j產生該鏈路信息的時間戳。
3)下一跳表NEXT
NEXT(j)給出到達目的節點j最短路徑上的下一跳地址。
4)距離表D
D(j)給出從節點i到節點j最短路徑的長度。可以使用不同的加權函式來計算,本算法使用跳數來計算最短路徑,即如果兩個節點之間存在一跳邊,則兩者之間的權值為1;否則兩者之間的權值為無窮。
(2) 交換的訊息
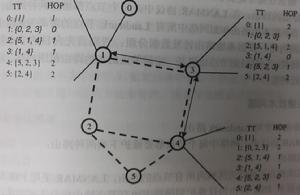 圖1-3 使用FSR協定後控制訊息的變化
圖1-3 使用FSR協定後控制訊息的變化鄰節點之間周期性地交換拓撲表中的鏈路狀態信息,如圖1-3所示,離節點的距離越近,更新的頻率越高,圖中字型加黑且傾斜的條目比不加黑不傾斜的條目更新頻率高。
2、工作過程
(1) 節點的初始化
協定開始運行時,每個節點的鄰居列表A和拓撲表TT均為空。
(2) 路由分組的處理
假設一個節點只能收到鄰節點傳送的鏈路狀態分組,這樣當節點i收到鏈路狀態分組時,就會將該分組的傳送者添加至自己的鄰居列表A,並更新本地存儲的拓撲表TT。對每個TT中的節點j,檢查pkt.SEQ(j)與本地的TT.SEQ(j),如果前者的序列號新,則使用pkt.LS(j)替換本地的TT.LS(j),同時pkt.SEQ(j)替換本地的TTi.SEQ(j)。
(3) 修改鄰居列表和拓撲表
處理完接收到的路由分組後,節點i將檢驗本地鄰居列表A中節點的有效性,用新的A修改拓撲表TT中的TT.LS(i)。
(4) 計算最短路徑
根據最新的拓撲表TT,使用選定的最短路徑計算節點i至所有其他節點的最短路徑,更新NEXTi表及D表。
(5) 向鄰節點傳送最新的鏈路狀態信息
掃描本地的拓撲信息表TTi,對每一個條目TTi.LS(j),根據D(j)是否在FSR協定規定的範圍層次n內,決定是否將TTi.LS(j)加入到欲傳送的路由分組中。FSR協定有不同的範圍層次,不同的範圍層次有不同的更新頻率,離節點的距離越近,更新的頻率越高。
生成路由分組後,向鄰節點廣播並進入下一輪的路由分組處理過程。
(6) 數據分組轉發
每個節點根據自己計算的“最短”路徑轉發數據分組。在轉發節點與目的節點之間距離較遠的情況下,受鏈路狀態傳播時延和節點移動性的影響,該“最短”路徑未必最短。隨著數據分組距離目的節點越來越近,轉發節點存儲的路由信息也越來越精確,直至數據分組最終到達目的節點。
總結
FSR協定是一種先應式的自組網路由協定,它運用魚眼技術對不同距離的節點採用不同的路由更新頻率,並且路由分組僅在鄰節點之間交換,降低了路由的控制開銷。通過恰當選擇魚眼範圍層次和半徑大小,可以提供比較準確的路由信息。該協定存在的問題是路由表的大小仍然隨網路的增大而線性增加,到達遠處目的節點的路徑可能是過時的。
