產品介紹
陀螺電機是陀螺儀的一部分,電機轉子就是陀螺儀的飛輪,在高速旋轉下構成陀螺儀最本質的物理性質—陀螺效應。陀螺電機在原理上與一般電機沒有本質差別,但它的設計,製造精度應服從於陀螺儀的需要。轉子的轉動慣量比一般普通電機要大,轉速高且穩定,電機抗干擾能力強,發熱量小,對陀螺轉子不產生附加干擾力矩,啟動時間短,重複性好,結構簡單等。早期的陀螺儀採用的是火藥驅動,穩定性和可重複性較差,而且火藥燃燒的廢物對陀螺的平衡產生較大幹擾,使陀螺儀產生漂移。後來採用直流有刷電機,雖然直流有刷電機轉速比較容易控制,但直流有刷電機的採用電刷換相,換相過程中會有較大的接觸摩擦,還會產生電火花,導致電磁干擾。後來又有人採用交流電機,這種電機雖然去掉了電刷,簡化了結構,提高了可靠性和安全性,但是它的轉速不好控制,穩定性不高,這在高精度陀螺儀中是不允許的。後來出現了直流無刷電機,到 20 世紀 70 年代後,由於電子技術的飛速發展,解決了高控制精度,高可靠性的直流無刷電機不能自啟動的難題。因此,高精度,高可靠性,低功耗的直流無刷電機在陀螺儀中得到了廣泛套用。
永磁無刷直流電動機
 電動陀螺儀
電動陀螺儀永磁無刷直流電動機的優點是:效率高,一般可達 90%--98%。轉速穩定度高;採用閉環系統 PID 技術後,抗干擾能力強、精度高、重複性好;結構簡單、工作可靠。永磁同步電動機的缺點是:電機本身無啟動轉矩、啟動困難、有死點,必須採用電子啟動電路才能順利啟動。但一經啟動,它將快速達到額定、同步轉速。鑒於永磁同步電動機具有上述優點,電子啟動電路亦易實現,故在隨機漂移小於 的框架式陀螺儀中得到了廣泛的套用。
原理
陀螺儀原理
高速旋轉的物體的旋轉軸,對於改變其方向的外力作用有趨向於垂直方向的傾向。而且,旋轉物體在橫向傾斜時,重力會向增加傾斜的方向作用,而軸則向垂直方向運動,就產生了搖頭的運動(歲差運動)。當陀螺經緯儀的陀螺旋轉軸以水平軸旋轉時,由於地球的旋轉而受到鉛直方向旋轉力,陀螺的旋轉體向水平面內的子午線方向產生歲差運動。當軸平行於子午線而靜止時可加以套用。
陀螺儀基本上就是運用物體高速旋轉時,角動量很大,旋轉軸會一直穩定指向一個方向的性質,所製造出來的定向儀器。不過它必需轉得夠快,或者慣量夠大(也可以說是角動量要夠大)。不然,只要一個很小的力矩,就會嚴重影響到它的穩定性。
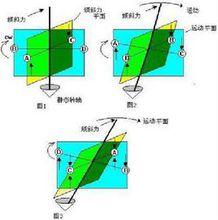 電動陀螺儀
電動陀螺儀用四個質點ABCD來表示邊上的區域,這個邊對於用圖來解釋陀螺儀的工作原理是很重要的。軸的底部被托住靜止但是能夠各個方向旋轉。當一個傾斜力作用在頂部的軸上的時候,質點A向上運動,質點C則向下運動,如其中的子圖1。因為陀螺儀是順時針旋轉,在旋轉90度角之後,質點A將會到達質點B的位置。CD兩個質點的情況也是一樣的。子圖2中質點A當處於如圖的90度位置的時候會繼續向上運動,質點C也繼續向下。AC質點的組合將導致軸在子圖2所示的運動平面內運動。一個陀螺儀的軸在一個合適的角度上旋轉,在這種情況下,如果陀螺儀逆時針旋轉,軸將會在運動平面上向左運動。如果在順時針的情況中,傾斜力是一個推力而不是拉力的話,運動將會向左發生。在子圖3中,當陀螺儀旋轉了另一個90度的時候,質點C在質點A受力之前的位置。C質點的向下運動受到了傾斜力的阻礙並且軸不能在傾斜力平面上運動。傾斜力推軸的力量越大,當邊緣旋轉大約180度時,另一側的邊緣推動軸向回運動。
光電編碼器在電動陀螺儀中的作用
陀螺儀在工作過程中,可以通過實時測量火箭彈滾轉的角度來計算火箭彈的滾轉速度。最初的框架式陀螺儀採用接觸電刷式角度感測器來測量火箭的姿態角及其滾轉速度,但是接觸摩擦力對陀螺儀的影響很大,將使陀螺儀產生較大的漂移;後來採用了霍爾角度感測器,雖然霍爾感測器基本不產生摩擦,減小了漂移,但是霍爾感測製造複雜,而且精度不高,不能準確的測出火箭的飛行姿態角以及滾轉速度。現在由於單片機的出現和空間技術的發展,出現了把軸角位置轉換成對應的數字代碼的無接觸感測器也就是光電軸角編碼器。它用光電方法將軸角轉換成電壓信息,再經過電路處理為數字代碼形式。它又分為絕對式和增量式兩種編碼器。其中增量式編碼器是將輸入軸角分為多個單位增量,敏感元件對這些增量回響。每當出現一個單位增量時,敏感元件就向計數器發出一個脈衝,計數器把這些脈衝累加起來,並以二-十進制數字碼的形式再由輸出端給出所需要的輸入角度的瞬時信息。由於發光元件和接收元件之間沒有任何摩擦,減小了陀螺儀的漂移,同時數位訊號準確穩定,提高了檢測的可靠性。
發展歷程
二十世紀初,由於航海事業的興起和北極探險的需要,促進了陀螺儀技術的發展,而且,當時異步電動機和滾珠軸承也都達到了一定的水平。安休茲於 1908 年在德國、斯派利於 1911 年在美國,先後各製成一種原理基本相同而結構不同的陀螺羅盤,用來測量輪船的航向。陀螺儀在航空上的套用比航海稍晚些。從二十年代到三十年代,在飛機上相繼使用了陀螺儀轉彎儀、陀螺地平儀和陀螺半羅盤,提供飛機轉彎、姿態和航向指示。三十年代中期,在飛機自動駕駛儀中使用了垂直陀螺儀、航向陀螺儀和速率陀螺儀,作為飛機姿態、航向和角速度的敏感元件。從四十年代到五十年代,航空陀螺儀表向組合式方向發展,相繼出現了陀螺磁羅盤、全姿態組合陀螺儀和陀螺穩定平台。六十年代以後,姿態和航向的顯示從原先機械式的發展成為電子式的綜合顯示。如在平視顯示儀中就把姿態和航向等多種信息綜合在一起顯示,使得飛行員能夠直觀、形象而迅速地判讀出各種信息。
我國的慣導技術近年來已經取得了長足進步,液浮陀螺平台慣性導航系統、動力調諧陀螺四軸平台系統已相繼套用於長征系列運載火箭。其他各類小型化捷聯慣導、光纖陀螺慣導、雷射陀螺慣導以及匹配 GPS 修正的慣導裝置等也已經大量套用於戰術制導武器、飛機、艦艇、運載火箭、宇宙飛船等。如漂移率 0.01°~0.02°/h 的新型雷射陀螺捷聯繫統在新型戰機上的試飛,漂移率0.05°/h 以下的光纖陀螺、捷聯慣導在艦艇、潛艇上的套用,以及小型化撓性捷聯慣導在各類飛彈制導武器上的套用,都極大的改善了我軍裝備的性能。由於我國的近距攻擊制導中,對陀螺儀的精度要求不像遠程攻擊那樣高,因而採用了價格便宜的原始的框架式機械慣性陀螺儀,這種陀螺儀大多採用傳統的火藥驅動,也就是燃氣陀螺,工作很不穩定,更為重要的是它不可測,只能是一次性使用,所以先進穩定,成本低廉,精度較高,可以重複測試的電動陀螺儀就成為我國未來短程精確制導武器的重點發展對象。
