
轉換器基本概念
真實的世界是模擬的世界,隨著積體電路設計技術和製造工藝的進步,信號的處理越來越多的以數位訊號的方式進行,數字電路處理信號的速度越來越快,精度也越來越高,模數轉換器(Analog Digital Converter)和數模轉換器(DigitalAnalog Converter)是連線模擬世界和數字世界的橋樑,數字電路處理速度和精度的日益提高對轉換器的要求也越來越高。
從圖可以看出模數和數模轉換器在信號處理系統中所處的位置。以視頻信號的處理流程為例進行簡單的說明:
•1.通常感測器會先感應,將自然的光影像轉化為模擬信號輸入。
•2.轉化得到的模擬信號會先進行放大,為了避免信號的高頻干擾成份在模數 轉換後折射到低頻區域,模擬信號會先進行抗混疊濾波(Antiabasing filter),再進行模數轉換。
•3.濾波後的模擬視頻信號通過ADC變成數字視頻信號,數字視頻信號可通過數位訊號處理電路進行濾波/圖像處理/壓縮的動作。
•4.當需要將該視頻信號輸出時,將數字電路處理過的視頻信號先經過數模轉換器轉化為模擬信號,由於數模轉換器直接輸出的信號仍然帶有時鐘台階(step),所以會再經過光滑濾波器(smooth filter)後再輸出。
•5.通常模擬視頻接口包含CVBS接口,VGA接口以及YUV接口。
 視頻速度模數轉換器
視頻速度模數轉換器模數轉換器
簡介
模數轉換器即A/D轉換器,或簡稱ADC,通常是指一個將模擬信號轉變為數位訊號的電子元件。通常的模數轉換器是將一個輸入電壓信號轉換為一個輸出的數位訊號。由於數位訊號本身不具有實際意義,僅僅表示一個相對大小。故任何一個模數轉換器都需要一個參考模擬量作為轉換的標準,比較常見的參考標準為最大的可轉換信號大小。而輸出的數字量則表示輸入信號相對於參考信號的大小。
回響類型
大多數模擬數字轉換器的回響類型為線性,這裡的“線性”是指,輸出信號的大小與輸入信號的大小成線性比例。
一些早期的轉換器的回響類型呈對數關係,由此來執行A-law算法或μ-law算法編碼。
誤差
模擬數字轉換器的誤差有若干種來源。量化錯誤和非線性誤差(假設這個模擬數字轉換器標稱具有線性特徵)是任何模擬數字轉換中都存在的內在誤差。也有一種被稱作孔徑錯誤(aperture error),它是由於時鐘的不良振盪,且常常在對時域信號數位化的過程中出現。
這種誤差用一個稱為“最低有效位”的參數來衡量。
採樣率
模擬信號在時域上是連續的,因此可以將它轉換為時間上連續的一系列數位訊號。這樣就要求定義一個參數來表示新的數位訊號採樣自模擬信號速率。這個速率稱為轉換器的採樣率或採樣頻率。
可以採集連續變化、頻寬受限的信號(即每隔一時間測量並存儲一個信號值),然後可以通過插值將轉換後的離散信號還原為原始信號。這一過程的精確度受量化誤差的限制。然而,僅當採樣率比信號頻率的兩倍還高的情況下才可能達到對原始信號的忠實還原,這一規律在採樣定理有所體現。
由於實際使用的模擬數字轉換器不能進行完全實時的轉換,所以對輸入信號進行一次轉換的過程中必須通過一些外加方法使之保持恆定。常用的有採樣-保持電路,在大多數的情況里,通過使用一個電容器可以存儲輸入的模擬電壓,並通過開關或門電路來閉合、斷開這個電容和輸入信號的連線。許多模擬數字轉換積體電路在內部就已經包含了這樣的採樣-保持子系統。
混疊
所有的模擬數字轉換器以每隔一定時間進行採樣的形式進行工作。因此,它們的輸出信號只是對輸入信號行為的不完全描述。在某一次採樣和下一次採樣之間的時間段,僅僅根據輸出信號,是無法得知輸入信號的形式的。如果輸入信號以比採樣率低的速率變化,那么可以假定這兩次採樣之間的信號介於這兩次採樣得到的信號值。然而,如果輸入信號改變過快,則這樣的假設是錯誤的。
如果模擬數字轉換器產生的信號在系統的後期,通過數字模擬轉換器,則輸出信號可以忠實地反映原始信號。如經過輸入信號的變化率比採樣率大得多,則是另一種情況,模擬數字轉換器輸出的這種“假”信號被稱作“混疊”。混疊信號的頻率為信號頻率和採樣率的差。例如,一個2千赫茲的正弦曲線信號在採樣率在1.5千赫茲採樣率的轉換後,會被重建為500赫茲的正弦曲線信號。這樣的問題被稱作“混疊”。
為了避免混疊現象,模擬數字轉換器的輸入信號必須通過低通濾波器進行濾波處理,過濾掉頻率高於採樣率一半的信號。這樣的濾波器也被稱作反鋸齒濾波器。它在實用的模擬數字轉換系統中十分重要,常在混有高頻信號的模擬信號的轉換過程中套用。
儘管在大多數系統里,混疊是不希望看到的現象,值得注意的是,它可以提供限制頻寬高頻信號的同步向下混合(simultaneous down-mixing ,請參見採樣過疏和混頻器)。
數模轉換器性能參數
數模轉換器的性能包含靜態性能、動態性能和瞬態性能。靜態性能包含失調誤差(offset errors)、增益誤差(gain errors)、積分非線性(Integral NonLinearity,即INL),微分非線性(Differential NonLinearity,即DNL)、以及單調性(Monotonicity);動態性能包含信噪比(SNR)、信噪失真比Signal to Noise and Distortion Ratio,即SNDR),有效位數(Effective Number of Bits)、以及總諧波失真(Total Harmonic Distortion,即THD ) ;瞬態性能包含建立時間(settling time)和毛刺能量(Cllitoh energy,
下面分別介紹每個性能參數的含義:
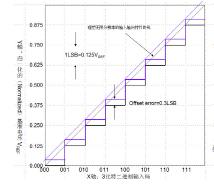
1.失調誤差:實際數模轉換器和理想數模轉換器輸出存在固定的偏移,偏移量以LSB來表示,如圖,失調誤差=0.3LSB 。
 視頻速度模數轉換器
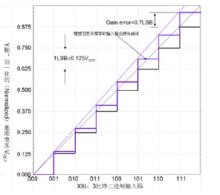
視頻速度模數轉換器2.增益誤差:實際數模轉換器和理想數模轉換器的輸出曲線存在增益誤差,其定義為實際數模轉換器最大電壓減去理想數模轉換器最大電壓,單位為LSB,如圖的例子,增益誤差=0.7LSB 。
 視頻速度模數轉換器
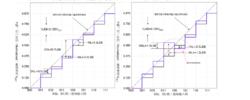
視頻速度模數轉換器3.積分非線性(INL):相同輸入數字碼時,實際數模轉換器的輸出減去其對應的理想數模轉換器輸出,單位為LSB。
4.微分非線性(DNL ):實際數模轉換器在相鄰碼遞增切換時的電壓跳變的幅度((LSB)和1LSB的差值。
下圖分別舉例說明了INL和DNL的定義。實際上從數學關係來看,INL的微分結果即是DNL, DNL的積分結果即是INL 。
5.單調性:單調性是指數模轉換器輸入在逐漸增加時,輸出也是逐步增加的,若輸入增加,輸出卻減小,此時即呈現非單調性,如下圖左圖是單調性的,右圖是非單調性的,此時DNL會小於-1LSB。
 視頻速度模數轉換器
視頻速度模數轉換器6.信噪比(SNR:即信號功率比上噪聲功率(dB),前面己經證實過,理想N位數模轉換器SNRMax=6.02N+1.76 dB,實際SNR會小於理想值。
7.信噪失真比(SNDR):即信號功率比上噪聲功率加諧波功率(dB ),噪聲包含量化噪聲和干擾噪聲等等,失真則是因數模轉換器的非線性輸出一輸入關係所引起的,在頻譜上出現信號諧波。
8.有效位數(ENOB):實際數模轉換器的SNDRREaL會小於理想情況,由上面的公式反推可以得到:ENOB= ( SNDR.-1.76 ) /6.02 。
9.總諧波失真(THD):所有階諧波的總能量稱為總諧波失真(單位為 dB )
10.建立時間:輸入二進制碼切換時,輸出電壓建立到一定精度範圍內所需要的時間,通常精度取0.5LSB,該性能反映了數模轉換器的速度
11.毛刺能量:輸入切換時在輸出呈現的短時間脈衝,成為毛刺,毛刺能量用該毛刺的面積表征,單位為pS*V。
適應視頻速度的電流舵數模轉換器
Unary結構
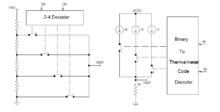
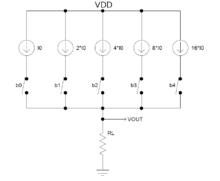
Unary電流舵數模轉換器的分析方式和電阻分壓類型數模轉換器分析方式類似,圖左邊是二比特的電阻分壓DAC,右圖是二比特電流舵數模轉換器。前者需要2-4解碼器來控制開關選擇某個分壓點的電壓作為轉換器輸出,而後者則需要二進制到溫度計碼的轉換電路,二進制輸入每增加‘1',流到負載RL的電流就會多IO。
 視頻速度模數轉換器
視頻速度模數轉換器N比特電阻分壓型DAC需要2N個電阻,電流舵DAC則需要2N-1個電流單元。電阻分壓型數模轉換器利用電阻對基準電壓VREF分壓產生1LSB的電壓,I LSB=VREF/2N,電流舵DAC由單位電流IO流過電阻負載RL產生的壓降IO*RL產生1LSB的電壓,所以電流舵DAC中的IO和位數以及RL的大小決定了VouT的幅度,VouT=(2N- I ) *RL*IO 。
很明顯,上圖的兩種數模轉換器的輸出電壓特性均為單調性的。
兩種數模轉換器的微分非線性誤差(DNL)均由單個器件的精度所決定,所以DNL會比較小,假設單元電流IO的標準偏差(Standard Deviation)為σ(I),則DNL大小為σ(I)/IO,而INL和流到RL上的單元電流個數n有關,INL大小為n * σ(I)/IO
二進制權重
下圖是5比特二進制權重的數模轉換器的實現方式,總共只有5個二進制編碼的電流單元,即後一個電流大小是前一個的兩倍,5比特二進制輸入直接控制5個開關,用以確定流到負載RL的電流大小,形成模擬電壓輸出Vout。
 視頻速度模數轉換器
視頻速度模數轉換器此方式實現的數模轉換器控制非常簡單,N比特數字輸入碼直接依次加在二進制加權電流單元開關上,不需要任何的解碼動作。為了達到比較好的版圖匹配,n*IO電流單元由n個單獨的IO單元來實現。二進制加權數模轉換器的缺點就是DNL 比較差,理論上來講,最差的DNL發生在MSB(Most significant Bit)的轉換:
即0111...111到1000 ...000之間的轉換,此時所有電流單元開關都有開/關互換的動作。
假設單個電流單元的標準偏差為σ(I),根據統計學原理,可以簡單的求得最差DNL為(2 1) *σ(I)/IOo。 INL偏差和Unary數模轉換器是一樣的。
分段組合
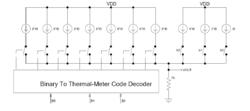
由前面的分析可知Unary解碼方式比二進制權重方式能夠實現更高的精度,但是其數字解碼電路的複雜性以及功耗在高解析度的要求下是以2的指數的方式增大,所以變的難以接受。對於更高精度的數模轉換器,一般用兩種方式相結合的方式來實現,即分段組合法方式(Segmented Architecture)。其中MSB部分由Unary方式來實現,達到高解析度,LSB部分由Binary Weighted方式來實現,以節省Digital部分的面積。
 視頻速度模數轉換器
視頻速度模數轉換器如圖是簡單的3+3結構的分段數模轉換器,低三位是二進制權重結構,電流源大小分別為1*I0,2*I0,4*IO,總電流為7*IO;高三位由Unary結構來實現,每個電流源的電流大小為8*IO。
可以知道最差微分非線性誤差發生低三位二進制權重電流全部開/關以及單個Unary電流源關/開的時候。最差DNL為(2 1) * σ(I)/IO,其中n為LSB二進制權重DAC的位數,此例的值為3。
一般對於N比特電流舵數模轉換器來講,如果規定了輸出電壓的幅度以及電阻負載的大小,那最小單元的電流也就確定:Iunit=V/(RL*2 ),所以不管以哪種結構來實現電流舵DAC,電流單元矩陣的電流消耗都是一致的,不同的是數字電路部分會存在差別,Unary解碼器將二進制輸入解碼為溫度計碼,占用的比特數越多,則解碼電路越複雜,功率消耗也就越大,但同時精度也就會越高;二進制碼占用的比特數越多,解碼電路越簡單,面積和功耗相對也就小,但是精度會相對差一些,所以在實際設計中要根據代工廠提供的工藝(Process)結合實際情況進行折衷(Tradeoff)。
