
研究背景
角速度是描述物體運行狀態的重要參數,分為傾角角速度和旋轉角速度。通過對瞬時角速度的測量,可以監測物體的運動狀態,從而對其運動姿態進行控制。目前,角速度測量已經在汽車、軍事、航天、工業、電子等多個領域得到了廣泛的套用。
近年來關於傾角角速度感測器的研究主要包括磁流體動力學角速度感測器、微熱對流角速度感測器、新型MEMS 仿生三維角速度感測器和基於Coriolis 效應的微機械陀螺等。
由於旋轉機械的套用領域更為廣泛,因此旋轉角速度檢測裝置的使用範圍也更大。目前測量旋轉機械瞬時角速度的裝置主要是測速發電機,測速發電機分直流、交流測速發電機兩大類。
直流測速發電機由於電刷接觸電阻和電樞反應的影響,其輸出特性的線性誤差較大,約為0.3%左右,且存在低速失靈區和紋波影響;
交流測速發電機不存在電刷接觸電阻產生的影響,但運行時由於轉子漏阻抗和激磁繞組漏阻抗的影響,同樣導致其輸出特性的線性誤差較大; 此外,由於交流異步測速發電機的兩相定子繞組不完全垂直,或是氣隙不均,磁路不對稱,亦或是空心杯轉子的壁厚不均以及製造杯型轉子的材料不均,會造成一定的剩餘電壓。
基於此,研究了一種無刷式測速發電機。
結構
 無刷式測速發電機
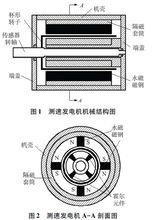
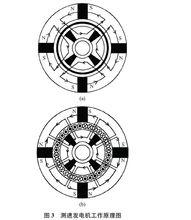
無刷式測速發電機無刷式測速發電機的機械結構如圖1、圖2 所示,其中圖2 為圖1 對應的A-A 剖面。發電機主要包括轉軸、杯形轉子、隔磁套筒、永磁磁鋼、機座、內外定子和霍爾元件。
其中測速發電機的外定子通過外隔磁套筒固定在機座的內側; 永磁磁鋼嵌放在各部分之間的夾槽中; 內定子通過內隔磁套筒與右端蓋固定,內隔磁套筒中心位置設有通孔,霍爾元件嵌放在各部分之間的夾槽中; 杯形轉子的杯壁置於內、外定子之間的空氣隙中; 內定子之間的霍爾元件與外定子之間的永磁磁鋼,在空間相互錯開45°角。
工作原理
 無刷式測速發電機
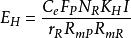
無刷式測速發電機外定子中的永磁磁鋼產生的磁場分布情況如圖3 所示,磁力線經過外定子、空氣隙、杯形轉子和內定子後形成閉合迴路。由於永磁磁鋼與霍爾元件的安裝位置在空間上錯開45°角,因此永磁磁鋼產生的磁場與霍爾元件不存在交鏈。
當杯形轉子靜止時,如圖3( a) 所示,由於永磁磁鋼產生的恆定磁通沒有穿過霍爾元件,因此霍爾元件不產生霍爾電勢; 當杯形轉子開始轉動時,即存在瞬時旋轉角速度,如圖3( b) 所示。此時杯形轉子開始切割永磁磁鋼的恆定磁通,將杯形轉子的杯體看作是很多根的導條,則根據法拉第電磁感應定律,杯形轉子中產生與瞬時角速度對應的感應電動勢。
假設杯形轉子的旋轉方向為逆時針,則根據右手定則,杯形轉子產生的感應電動勢方向如圖3( b)所示。感應電動勢產生相應的短路電流,短路電流的方向與感應電動勢的方向相同。此時短路電流會產生對應的磁場,如圖3( b) 所示,該磁場經由內定子、霍爾元件、空氣隙、杯形轉子和外定子後形成閉合迴路。 由於該磁通與霍爾元件匝鏈,則根據霍爾效應,霍爾元件產生相應的霍爾電勢。
數學模型
輸出特性
1、根據磁路的歐姆定理,永磁磁鋼產生的恆定磁通量為公式(1):
 無刷式測速發電機
無刷式測速發電機式中
F——為永磁磁鋼的磁勢;
R——為永磁磁鋼產生的磁通所經過磁路的磁阻。
2、根據法拉第電磁感應定律,當杯形轉子以瞬時旋轉角速度Ω 逆時針切割永磁磁鋼的磁通時,產生的切割電動勢為公式(2):
 無刷式測速發電機
無刷式測速發電機Ω
式中
C——為與杯形轉子結構相關的常數。
3、根據歐姆定律,杯形轉子導條中產生的電流為公式(3):
 無刷式測速發電機
無刷式測速發電機式中
r——為杯形轉子的等效電阻。
4、根據磁路的歐姆定理,杯形轉子4的電流產生的磁通量為公式(4):
 無刷式測速發電機
無刷式測速發電機式中:
N——為杯形轉子的等效匝數;
R——為杯形轉子電流產生的磁通所經過磁路的磁阻。
5、根據霍爾效應可知,霍爾元件產生的霍爾電勢為公式(5):
 無刷式測速發電機
無刷式測速發電機式中
K——為與霍爾元件結構和性質相關的常數;
I——為霍爾元件的控制電流。
6、聯立上述公式(1)~(5)即可得到公式(6):
 無刷式測速發電機
無刷式測速發電機Ω
由式( 6) 可知,霍爾元件的電勢與杯形轉子的瞬時旋轉角速度成正比。
傳遞函式
當杯形轉子的瞬時角速度發生變化時,杯形轉子中的電流也會發生變化,由於杯形轉子存在電抗,根據基爾霍夫電壓定律,杯形轉子的電壓平衡方程為公式(7):
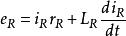 無刷式測速發電機
無刷式測速發電機聯立式( 1) ~ 式(7) 可得公式(8):
 無刷式測速發電機
無刷式測速發電機Ω
由此可得測速發電機的傳遞函式為公式(9):
 無刷式測速發電機
無刷式測速發電機由此可知,由於杯形轉子電抗的存在,測速發電機為一階慣性環節,其時間常數為L /r,因此可選用電阻率較大的材料製作杯形轉子。以改善測速發電機的動態特性。
