
簡介
過送風機的動葉來調整的。兩台離心式或兩台軸流式引風機,引風量通過引風機的入口擋板(離心式)或動葉(軸流式)來控制。如果送風量比較大,送風量與燃料量的比例係數K(最佳比例值)隨之增大,爐膛內燃燒將不會充分,達不到經濟性。如果送風量比較小,送風動葉開度就會比較小,臨近送風機的喘振區,喘振危害性很大,嚴重時能造成風道和風機部件的全面損壞,而總風量小於25%時,就會觸發MFT(主燃料跳閘)動作。如果引風量比較大,也就是爐膛壓力太低,會使大量的冷空氣漏入爐膛內,降低了爐膛溫度,增大了引風機負荷和排煙帶走的熱量損失。如果引風量太低,也就是爐膛壓力高,接近大氣壓力,則爐煙會往外冒,影響設備與工作人員的安全。所以,送風量、引風量過高或過低都是生產過程所不允許的 。
為了保證鍋爐生產過程的安全性、經濟性,送風量和引風量必須通過自動化手段加以控制。因此,送風量和引風量的控制任務是:使送風量與燃料量有合適的比例,實現經濟運行;使爐膛壓力控制在設定值附近,保證安全運行。
引風控制系統的設計是為了實現對爐膛壓力的控制,如果爐膛壓力接近於大氣壓力,則爐煙往外冒出,嚴重時甚至引起爐膛爆炸,影響設備與工作人員的安全,反之,如果爐膛壓力過低,又會使大量的冷空氣漏入爐膛內,降低爐膛溫度增大引風機負荷和排煙帶走的熱量損失。引風控制系統就是使爐膛壓力維持在額定的壓力工況下。控制爐膛負壓的手段是調節引風機的引風量,其主要的外部干擾是送風量。由於引風調節對象的動態回響快,測量也容易,所以引風控制系統設計成只需採取以爐膛負壓作為被調量的單迴路控制系統,由於送風量的變化是引起負壓變化的主要原因,為了使引風量快速的跟蹤送風量,以保持二者的比例,可將送風量作為前饋信號引入引風調節器而使引風量跟著改變。是一個快速補償系統。這樣當送風控制系統動作時,引風控制系統跟著立即動作,而不是等爐膛負壓偏離給定值後在動作,從而能使爐膛負壓基本不變。有利於提高引風控制系統的穩定性和減小爐膛負壓的動態偏差,改善系統的調節性能。另外,由於調節對象相當於一個比例環節,被調量反應過於靈敏,為了防止小幅度引起引風機擋板的頻繁動作,可以設定調節器是比例帶自動修復環節,使得在小偏差時增大調節器的比例帶。對於負壓的測量信號,也需要通過低通濾波,以抑制測量值的劇烈波動。
引風控制工作原理
燃燒控制系統在根據燃燒率指令控制燃料量和送風量的同時,必須相應地控制引風量,以維持爐膛壓力在設定值附近,保證安全運行。正常運行時,爐膛壓力設定值為-50—-100Pa,具體數值與爐膛壓力的測量位置有關。因為送風量是爐膛壓力最重要的擾動因素,所以一般取送風機動葉的控制指令(或送風機動葉的實際位置),作為引風量控制的前饋信號。當送風量(或控制指令)變化時比例改變引風量(指令),再根據爐膛壓力與設定值的偏差,由爐膛壓力調節進行校正調節 。
引風控制系統如圖所示。
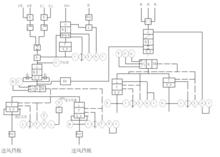 引風量控制系統
引風量控制系統系統輸入信號為爐膛壓力信號,選三個爐膛壓力測量值信號中的一個中間值作為調節器輸入信號,與給定值進行比較,對偏差進行比例積分運算後,輸出經MI多輸出接口組件送至各引風機控制迴路去調節引風機擋板的開度。由於爐膛壓力測量波動較大,為防止執行器不必要的頻繁動作,在調節器中加入非線性環節,起阻尼濾波作用。調節器的前饋信號來自送風控制系統調節器輸出的動態聯繫信號,以保證負荷變化時,引風控制與送風協調動作。
引風控制系統動作過程如下:當負荷變化時,鍋爐主控發出改變送風量的指令,送風調節器根據偏差運算,輸出改變送風機擋板的信號。同時,此信號通過動態聯繫組f(t)把信號送至引風調節器,引風調節器輸出一個大小與方向與送風調節信號相同的調節信號,改變引風機擋板開度。當送風機擋板開度與引風機擋板的相應開度不能完全保證爐膛壓力在給定值時,或其它擾動引起爐膛壓力變化時,則由調節器偏差信號進行校正。靜態時,動態聯繫組f(t)沒有輸出,故爐膛壓力保持為給定值。
引風控制系統的特點
引風控制系統的設計是為了實現對爐膛壓力控制,使其維持在額定負壓工況下,爐膛壓力的控制是通過對引風機入口靜葉進行調節來完成,該系統具有如下特點 :
A 系統並非簡單的串級調節系統,而是由3個PI 調節器共同完成爐膛壓力的調節,設定值為一固定參數,其缺點是手/自動切換有擾動,因此,在動態投自動時需手動將實際爐膛負壓調至或接近設定值再投入自動,否則引起擾動較大。當然,一般運行方式一旦風機啟動時將自動將爐膛壓力系統投入自動狀態,在啟動過程中存在一些擾動是允許的。2個輔助調節器主要實現對爐膛壓力的高低限制,它不同於其它電廠所採用的跟蹤限制,而採用調節限制,其優點是能夠快速消除動態超差,確保系統的安全性和穩定性。當系統運行在允許工況下,2個副調節器則處於跟蹤狀態,穩定偏差的消除靠主調節器來完成。
B 送風前饋的引入使得當進行燃燒調整時,能夠提前作用爐膛壓力調節系統,確保系統的快速性和穩定性。
C 增益自調節迴路的設計及電流平衡作用的實現相同於送風系統。
D 該系統可實現從風機啟動至鍋爐帶滿負荷全程自動調節以及當發生MFT時快速降低引風出力的功能。
E 該系統設計的缺點是當1台引風機已投入自動時,再投入第二台時,系統存在一個平衡過程,這就是本台機組在多次執行機構系統設計存在的共同缺陷,雖然,其平衡過程為一平滑過渡,但對系統本身仍是一個擾動源。
引風控制系統詳細介紹
爐膛壓力測量
爐膛壓力選用三冗餘變送器進行測量。其中一台變送器故障不致引起控制系統異常。如各個變送器均正常,則變送器間出現大的偏差時將發出報警。偏差正常時,運行人員可任選一台或中值、平均值信號 。
變送器有故障時,控制邏輯將自動切換到好的變送器。若變送器全部故障,控制邏輯自動切換到手動狀態運行。設有適當的聯鎖邏輯以防止運行人員選用故障變送器。
引風機控制指令
所選的爐膛壓力信號和運行人員設定的給定值加以比較,送入引風調節器,調節器輸出控制引風機入口動葉。為了使系統快速回響爐膛燃燒的變化,引入送風系統的風量指令或送風調節輸出作為引風系統的前饋信號。
在“氧量信號”的反系統中,該系統與上述不同在於:使引風量與負荷相適應;調送風量維持爐膛負壓;因為爐膛壓力本質上是低增益高積分控制,所以在誤差和比例/積分控制器之間用一個非線性函式塊加以修正。這種組態在爐膛壓力誤差大時用高增益比例調節,爐膛壓力接近設定點時用低增益修正,從而保證了控制的穩定性。如爐膛壓力低或引風機入口靜葉都在最大位置,該控制器禁止進一步增加。如果爐膛壓力高,則禁止進一步減少。
引風機MFT加速器、超越和定向閉鎖
該控制系統監測鍋爐何時跳閘並採取措施減小所造成的負壓偏差。鍋爐跳閘時,由負荷產生的負壓偏差被加到引風機入口靜葉控制信號上。這將使靜葉立即關閉。這個加速信號在短時間內使遲延變為0%。該迴路還用來補償投運風機的台數。如只有一颱風機運行,則在跳閘時增益為2。
如存在大的爐膛負壓偏離,即發生爐膛壓力超越。爐膛壓力超越控制器用來減小引風機入口靜葉的位置。當爐膛壓力超過其設定點以上一個預定量時,機組即開始降負荷(RUNBDOWN)。RUNDOWN一直持續到引風機能夠保持適當的爐膛壓力為止。加速和超越閉鎖發生在控制站的下游,從而避免運行人員無意中使爐膛壓力連續惡化。
入口靜葉指令的定向閉鎖可防止其向錯誤方向移動。一旦爐膛壓力異常,即閉鎖入口靜葉指令。爐膛內負壓偏大時,入口靜葉位置指令被存儲起來,進行選擇最低指令。自動控制只能減小而不能增加該指令量。如爐膛壓力出現正壓誤差,其控制邏輯與此相同,但方向相反。定向閉鎖在控制站下游因而可禁止運行人員或次後的指令信號來增加入口靜葉位置使爐膛壓力更負,或禁止減小靜葉位置使爐膛壓力更高。
軸流風機堵轉保護
軸流風機有一個獨特的性質,稱為堵轉(顫振)。堵轉情況是一種氣動力現象,當風機風葉被要求提供超出其設計能力的升力時,就在風葉周圍發生氣流分離現象。這時,風機呈不穩狀態,不在以其正常性能曲線運行。控制系統提供了一個方法來防止這種現象發生。
每個風機均配備有壓力開關,用以檢測堵轉條件。當風機接近進入堵轉條件時,一個負偏差加到風機指令(控制站輸出)上,該指令使靜葉或動葉降低出力以緩解這種狀態。如堵轉狀態通過減小出力指令仍未予糾正,則機組負荷指令將發出機組將負荷指令以降低機組負荷。
引風機偏差平衡系統
引風機的偏差迴路保證了平衡切換。當兩台引風機均正常時,引風機主控制站跟隨兩台引風機風葉指令的平均值。該平均值減去引風機風葉控制站的輸出即為偏差信號。然後把該偏差值從平均值中減去即為引風機A的輸入信號。該偏差加上平均值即為引風機B的輸入信號。這樣,該偏置網路使兩台引風機得以平衡以便切換到自動運行。例如,假設引風機A為60%,引風機B為40%,則平均值為50%,偏差為-10%即為引風機A的60%輸入信號,而50%加上-10%即為引風機B的40%信號。若只有一台引風機為自動運行,則偏置網路自動補償該台引風機,以抵消對手動運行風機的任何調節。兩颱風機間的偏差被連續計算,而且手動運行風機被平衡以便切換為自動運行。若兩颱風機均為自動則偏差調節有運行人員進行。
引風控制系統在火電廠中的套用
在電廠中引風控制系統實質上就是爐膛壓力控制系統。鍋爐的爐膛壓力通過控制2台引風機來保持,鍋爐的負壓一般控制在-20Pa左右 。
為了提高爐膛壓力控制系統的可靠性和提高調節品質,爐膛壓力調節通常採用如下方法。
(1) 爐膛壓力測量採用3台變送器,3台變送器經過控制算法後所選的值作為測量值,對這些變送器設有監控邏輯。當3台變送器全部正常時,選偏差不大的2台變送器的平均值作為測量值;當其中任一台變送器有品質報警,而其他2台無品質報警的變送器控制偏差大,此時切手動;當3台變送器全部有品質報警時,切手動;當3台變送器之間全部有控制偏差報警時,切手動。這樣就可以保證爐膛壓力測量信號的準確性。
(2)當爐膛負壓過低(-500Pa)時,控制系統將閉鎖引風機風量增加;當爐膛負壓過高(500Pa)時,該控制系統將閉鎖引風機風量減小,以保證爐膛壓力在要求的範圍內。
(3)在計算機中對爐膛負壓的測量值進行濾波(時間一般為2 s左右),以保證
執行機構不頻繁動作。
(4)爐膛壓力控制器一般設有一個死區,當爐膛壓力的設定值和測量值的偏差不超過死區範圍時,控制器的輸出不變,執行機構不動作,這就有效地消除了因爐膛壓力經常波動而使執行機構頻繁動作,提高了整個系統的穩定性和執行機構的使用壽命。
(5)為了保證爐膛壓力控制的正確性,當控制偏差超過一定數值時自動切手動,並有報警提示。
(6)爐膛壓力控制系統還設有防內爆功能。當鍋爐由於汽包液位低、爐膛壓力低等保護動作而發生鍋爐主燃料跳閘(MFT動作)時,由於鍋爐突然滅火引起鍋爐爐膛壓力大幅度下降,如果控制燃料的執行機構不及時動作,就有可能引起鍋爐爐膛內爆。為了避免這種情況的發生,用 MFT動作信號引發一組邏輯動作,直接前饋到該控制系統中去。在MFT動作後,2台引風機執行機構先向關的方向動作,直到開度達到原來設定的某一位置,保持一段時間後,使2台引風機的執行機構再向開的方向動作,直到開度達到MFT時的位置,這樣就實現了引風機的一組防內爆功能,從而保證了鍋爐的安全。
