
組成
前置泊車雷達通常由前置控制器(主機)、感測器(探頭、電眼)、指示器(顯示器或蜂鳴器或喇叭)組成。
具有無線功能的前置泊車雷達通常在控制器端和指示器端增加無線收發裝置。
具有車速控制功能的前置泊車雷達通常還有車速控制器,OBD電源控制裝置,或GPS智慧型車速控制模組。
A.1 感測器 sensor
 車悅內傾角感測器,賓士鈀銀
車悅內傾角感測器,賓士鈀銀是前置泊車雷達的重要組成部分,用於發射和/或接收障礙物探測信號的部件。 通常為超音波感測器,感測器的靈敏度和可靠性是產品性能好壞的重要的、決定性的因素。囿於感測器的開角,通常需要4個感測器,或6個感測器才能做到探測全覆蓋。
A.2 控制器 controller
是前置泊車雷達的重要組成部分,用於控制感測器傳送信號、處理感測器接收信號並使指示器工作的部件。
 車悅前置無線泊車雷達控制器
車悅前置無線泊車雷達控制器A.3 指示器 indicator
是前置泊車雷達的重要組成部分,用於給司機發出警示信號。
 車悅前置6路泊車雷達超清液晶顯示器
車悅前置6路泊車雷達超清液晶顯示器從後市場產品看,主要有蜂鳴器、喇叭、顯示器。蜂鳴器,用不同的蜂鳴節奏表示障礙物所在的區域,距離越近,蜂鳴音越急促;
喇叭,和蜂鳴器類似,但用和弦音或真人語音報警,聲音更悅耳,報警更直接;顯示器,用液晶顯示器,或數碼顯示器,或HUD顯示器等作為指示器的產品,除了能夠聲音(或語音)報警外,還能顯示障礙物的距離、方位、區域、測量模式(手動、自動、速控),GPS智慧型速控產品好、還可以顯示汽車行駛速度。
原理
採用超音波測距原理,由控制器控制感測器發射超音波信號,當超音波信號遇到障礙物時產生回波信號,感測器接收到回波信號後,經由控制器CPU進行計算,並加以處理、判斷,由顯示器顯示最近障礙物的距離、方位、區域等信息,並由蜂鳴器(喇叭)適時發出相應的警示聲音。
功能
 前置泊車雷達
前置泊車雷達前置泊車雷達的距離顯示、聲響報警、區域警示、方位指示和動態自檢等功能與倒車雷達類似,但又有關鍵性的功能前置啟動開關、前置模式設定、測量狀態指示等是倒車雷達所不具備的。
C.1 距離顯示
顯示車頭感測器與前方障礙物之間的測量距離,距離單位通常為米,顯示解析度為厘米或分米。
C.2聲響報警
用顯示器內置蜂鳴器,根據最近障礙物所在的不同區域,用不同的聲響節奏表示障礙物所在的區域。
C.3 區域警示
根據最近障礙物所在的不同距離區間,用區域圖或紅黃綠圖示表示障礙物所在的區域;
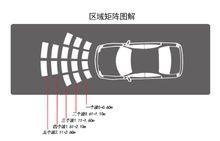 區域矩陣
區域矩陣或者根據每個感測器探測到的障礙物距離區間,分別顯示各自所在的區域,形成區域矩陣。
C.4 方位指示
用閃爍的方點陣圖標表示當前所探測到的最近障礙物的方位。
C.5 動態自檢
在啟動時或/和工作中,自動地檢查系統及各路感測器工作狀態,並用相應的蜂鳴聲數量或/和方點陣圖標表示各路感測器工作正常與否。
C.6 前置啟動開關
不同於用掛摘倒車檔來啟動和關閉倒車雷達,前置泊車雷達的開啟和關閉通常有手動、自動和速控等多種方式。
前置啟動開關是最簡單地開啟和關閉前置泊車雷達的方式。
C.7 前置模式設定
長按3秒前置啟動開關,蜂鳴器發出“滴滴”兩聲,顯示器顯示“-A-”或“---”,表示前置泊車雷達進入自動探測模式或手動探測模式。
C.8 測量狀態指示
用單獨點亮的小數點,表示雖然顯示器關閉,但前置泊車雷達仍然處於測量狀態,當有障礙物被測量到時,顯示器自動開啟。
C.9 音量調整
用音量調整檔位開關或按鈕,分級調整蜂鳴器音量,以適應不同司機的需要。
C.1無線信號對碼
為了確保無線控制器和接收器無線信號收發的唯一性,其收發密碼必須一致,當由於部件更換引起密碼不一致時,就需要對碼:在通電狀態按住對碼按鈕,當顯示器發出對碼成功信號後及表示對碼成功。
性能
前置泊車雷達的性能主要包括探測範圍、準確性、顯示穩定性等方面,尤其需要注意的是 最遠探測距離,必須足夠遠。
D.1 探測範圍
大多數產品範圍在 35cm~120cm,好的產品能達到 35cm~260cm。範圍寬的前置泊車雷達雷達能夠儘早測到目標,使得駕駛者提前預知,儘早防範;而過度地追求最小探測距離是沒有意義的,因為實際使用時必須充分考慮制動時的慣性因素。
對於汽車前保險槓造型比較複雜,安裝4路感測器無法覆蓋整個探測區域,盲區過大,應該考慮選擇前置6路泊車雷達。
D.2 準確性
主要看兩個方面。
一是看顯示的解析度,一般產品為10厘米,而好的產品能達到1厘米,而不帶距離顯示只有蜂鳴器的產品只能根據報警聲音節奏大概知道障礙物區域;
二是要看探測誤差,即顯示距離與實際距離之間的誤差,可以用直徑10cm的PVC管,在100cm左右距離正對感測器進行實測比較。好產品的探測誤差應低於2cm。
D3.顯示穩定性
是指在障礙物反射面不好或行駛過程中,能否在探測到障礙物時穩定顯示障礙物的距離;對於行駛過程中遇有外界干擾源,如汽車喇叭、剎車、高速聲噪等,看能否有效抑制,顯示器不亂顯亂跳。
技術標準
前置泊車雷達較之於倒車雷達具有更高的技術壁壘,需要解決4個重大的技術問題:
第一,抗干擾問題。不同於倒車雷達,前置泊車雷達安裝在車前,臨近發動機艙,面臨的環境十分複雜,必須解決聲音干擾和電磁干擾問題;由於長時間工作,還要克服高速風噪、外界聲音干擾。
 前置泊車雷達回波信號示意圖
前置泊車雷達回波信號示意圖第二,遠距探測問題。探測距離越遠,對駕駛者來說幫助越大,越容易方便地操控車輛;但探測距離過遠,會帶來數據處理難度的增加,如果沒有很好的技術手段,只能降低最遠探測距離。
第三,可靠性問題。後市場使用的前置泊車雷達和部分原裝前置泊車雷達通常處於長期開機狀態,對前置感測器可靠性要求比後置感測器大幾十倍至上百倍,因此同樣的可靠性要求對於前置泊車雷達來說要難很多。
第四,前置感測器開啟和關閉模式問題。
綜上,判斷前置泊車雷達在技術上是否過關,有兩個最基本的標準:
一是,開啟和關閉模式是否科學、合理、完備,是否能夠做到手動/自動/全自動的任意選擇;
二是,最遠探測距離能否做到和同廠家的倒車雷達一樣遠。
發展歷史
前置泊車雷達經歷了十多年的發展,直到近幾年才實現技術的突破:開啟和關閉的模式有了大的進步,最遠探測距離也能達到2.60米,為了安裝的方便,也出現了無線、防水、耐高溫的產品,回望歷史,前置泊車雷達大致經歷了4代。
F.1 第一代 手動開關+剎車
第一代產品是從倒車雷達演化而來,利用開關和剎車信號來開啟前置泊車雷達,當障礙物消失時,延時工作一段時間(如30秒),前置泊車雷達雷達關閉;下次需要使用時,再次踩剎車或按手動開關。
這一代產品的缺點顯而易見,最遠探測距離一般小於1.50米。高速行駛、減速踩剎車時也會啟動,很容易遇到風噪干擾;低速時需要使用時一定要剎車,司機體驗較差。
F.2 第二代 手動+自動
第二代產品在手動工作的基礎上,增加自動工作的模式,根據障礙物是否被探測到來自動地開啟和關閉,解決了第一代產品司機體驗不佳的問題,從本質上做到了需要時自動開啟,不需要時自動關閉,這一代產品完全符合使用要求。
但由於自動模式下控制器和感測器始終處於工作狀態,可靠性要求、抗干擾要求極高,只有極少的廠家能夠提供滿足要求的產品。
這一代產品除了技術要求高外,在某些極端條件,如大雨、超速行駛時也可能遇到難以克服的干擾,需要結合手動開關關閉。
F.3 第三代 手動+OBD速控/車速控制器
第三代產品,在手動工作的基礎上,利用OBD接口或車速信號線獲取汽車車速數據,控制前置泊車雷達的電源通斷,大大降低了產品可靠性要求和抗干擾要求。當車速低於某值(如15千米/小時)時開啟,當車速高於某值(如15千米/小時)時關閉,實現了類似於原車的工作模式。
這代產品雖然降低了技術門檻,但由於汽車OBD匯流排方式不統一造成產品通用性、維修性差;占用OBD接口,影響OBD接口的正常使用等缺點的存在,推廣受到一定的限制。
F.4 第四代 手動+自動+GPS智慧型速控
第四代產品,在手動和自動工作模式的基礎上,利用內嵌的GPS模組實時測量汽車車速,根據設定的車速(如15千米/小時)開啟和關閉前置泊車雷達,由於GPS測速方式具有通用性,可以方便地增加數字車速顯示功能,無需占用汽車本身資源,可靠性高,是目前後市場中最為科學、合理、方便的方式。
工作模式詳解
第四代前置泊車雷達具有手動、自動、GPS智慧型速控3種模式,其工作模式介紹如下:
G.1 手動模式
通過按前置啟動按鈕的方法啟動和關閉前置泊車雷達系統。當前置泊車雷達開始工作後,如果3秒鐘內未探測到障礙物,顯示器關閉,但控制器仍在工作;當30秒內未探測到障礙物,則前置泊車雷達系統停止工作。
G2. 自動模式
按住前置啟動/設定按鈕3秒,顯示器發出“滴滴”兩聲,顯示“-A-”,此時進入自動探測模式,在此模式下,前置泊車雷達只要探測到障礙物就點亮顯示器,顯示障礙物的位置等信息;如果3秒鐘內探測不到障礙物,則顯示器關閉,僅顯示“.”表示系統處於自動探測狀態。
G.3 GPS智慧型速控模式
在車速獲得後,開啟此模式,當車速低於15千米/小時時,前置泊車雷達開啟,按照設定的手動或自動模式工作;當車速高於15千米/小時時,前置泊車雷達關閉,顯示器顯示汽車速度。
手動/自動模式可以通過長按前置啟動按鈕進行切換,且具有記憶功能,汽車熄火後再次啟動,系統進入前次設定的狀態。
產品具有GPS智慧型速控模式時,手動/自動模式僅在速度低於設定值時有效。
其它相關問題
H.1 為什麼需要前置泊車雷達?
有許多車主知道倒車雷達的作用,而對於前置泊車雷達卻認為是可有可無,感覺前面的障礙物自己是能夠看見的,這個感覺一點都沒錯,相比倒車,汽車前進時我們都認為可以看得見。但事實不是這樣的,有的時候我們的感覺會欺騙我們。
比如,在狹窄道路上,兩邊停滿了車或其它障礙物時,我們往往很頭疼,明明感覺快要撞上了,指揮的人卻不耐煩地喊叫著“走,走,還有8丈遠呢!!!”
實際上,這樣的情形很常見,前置泊車雷達的優勢也很明顯:
泊車時,前後車位狹小,可以提高泊車效率和舒適度;
車寬限行隔離柱或隔離墩,從容通過;
汽車擁堵、紅燈等車時,心中有數,可近可遠;
慢速併線,看清前方、側方車距,瀟灑自如;
遇有花壇、台階、綠籬、矮墩時看不見;
人車擁擠道路,避開行人.
1.泊車時,前後車位狹小,可以提高泊車效率和舒適度;
2.車寬限行隔離柱或隔離墩,從容通過;
3.汽車擁堵、紅燈等車時,心中有數,可近可遠;
4.慢速併線,看清前方、側方車距,瀟灑自如;
5.遇有花壇、台階、綠籬、矮墩時看不見;
6.人車擁擠道路,避開行人.
最後總結一下,前置泊車雷達除了在泊車時能夠配合倒車雷達,使泊車更安全、便捷,除此之外,他還有比倒車雷達更多的用途,這就是慢速行駛時也能對處於盲區的障礙物有效探測和提醒,這就是為什麼高端車早就開始配置前置泊車雷達的原因。
H.2 什麼樣的人或車需要前置泊車雷達?
什麼樣的車和什麼樣的人最需要前置泊車雷達呢?或者說什麼情況下應該安裝前置泊車雷達呢?
1. 凡是已經安裝了倒車雷達的車,為了消除前方盲區,均可以通過安裝前置泊車雷達來實現這個目的;
2. 駕駛員坐著,看不到自己的車鼻子在哪兒,就需要前置泊車雷達;
3. 新手駕車,對距離判斷不敏感的人,安裝前置泊車雷達可以提高駕駛舒適度。
H.3 前方的盲區究竟有多大?
大多數人知道汽車前方存在盲區,但不知道盲區在什麼地方,盲區有多大。下面的幾個示意圖是有關人員的權威測試結果。
 A柱盲區
A柱盲區1、汽車右前方20多度的盲區,如果有小孩在那個位置,你是完全看不見的!面對視線盲區,一個鮮活的生命有可能被魯莽的駕駛者葬送!
2、從CRV和森林人的盲區圖可以看到:駕駛者的視線測量盲區達到90厘米左右,如果駕駛者身高低於1.70米,前方的視覺盲區超過1.10米;如果我們在駕駛時使用了前置泊車雷達,就可以清楚的發現:
 森林人前方盲區
森林人前方盲區當離前車大於3米時,我們剛剛可以看到前車的後輪,這時我們感覺到很安全;當離前車小於2.5米時,我們只能看到前車的後槓,道路擁堵時我們的感覺還可以;當離前車小於1.1米時,我們只能看到前車的後背箱,我們分明感覺到了危險;如果再靠近一些,我們分明感到了恐怖,我們再也不敢靠的太近了,其實,在擁堵的時候,我們要掰出去,要併線,1.1米的距離還有富餘,在這個時候,前置泊車雷達將幫助你精確駕車,而沒有泊車雷達,你是沒有辦法輕鬆、安全地完成以上的動作的!
H.4 前置6路泊車雷達有用嗎?
前置泊車雷達裝在車前,許多前保險槓是有一定造型的,探頭的安裝要受到汽車前槓的制約,同時,由於前置泊車雷達還有一個重要使命是防檫角,最外側的探頭必須安裝在角上稍偏外,所以,為了避免盲區過大,就需要用增加探頭數量的方法來解決。
1、對於車寬小於1.8米,車前保險槓比較平直(類似於後槓造型)的汽車,安裝4路前置泊車雷達即可;
2、對於車寬大於1.8米,車前保險槓造型特別的汽車,必須安裝6路前置泊車雷達,這就是為什麼賓士的所有前置泊車雷達均為6路的原因。
