發展沿革
EODAS最初的簡稱是DAIRS——分散式孔徑紅外系統,因其強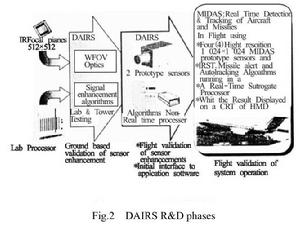
技術套用
EODAS可以用於成像,目的是將細節最大化,還可以用於遠距探測不可辨目標,如飛彈或飛機,目的是獲得靈敏度和抑制干擾雜波。成像套用包括領航/導航、態勢感知、瞄準和戰場損傷評估的支援。不可辨目標探測的套用包括飛彈威脅告警和IRST。成像套用
對導航套用來說,EODAS與顯示系統和飛行員的互動決定了需求。需要統一放大倍數的解析度給飛行員提供“窗戶外”的環境,以滿足相當於VFR,目視飛行規則,的操作需要。在當前使用導航IR感測器的經驗基礎上,0.5~1.0mrad的解析度被認為是最低可接受的範圍。由於飛機振動對飛行員視覺的影響會導致系統性能降低,因此獲得人眼解析度極限(0.15mrad),並不是必須的。頭盔瞄準顯示器(HMD)對克服座艙顯示器視界的限制非常有吸引力。為了避免使用HMD時產生的贗像,具有很少或沒有畸變的無縫圖像很重要。EODAS和HMD聯合起來提供了一種新的工作模式,即當JSF以VSTOL降落時具有一種“穿透地板”觀察的能力。飛行員利用電子可控“後視鏡”,可以提高態勢感知能力,從而看到附近的飛機。戰鬥損傷評估,BDA,只有在一個非常高解析度感測器的幫助下,才能得到最好的實現。EODAS可以通過提供連續的全向覆蓋來提供有用的數據,並為其有限的解析度做出補償。在時間歷程是重要線索的事件里,包含著發炸藥、產生熱氣或碎片噴射羽煙的延遲起爆武器和武器爆炸後燃燒的目標。對這些情況來說,EODAS是一個功能BDA感測器,可以替換高解析度的感測器。關鍵的要求是要有足夠的動態範圍,可以感應這些密度高、時間短的事件,而對當前部署的系統來說,不會造成過載和產生很長的恢復時間。
探測套用
EODAS在不可辨目標探測上的套用,就是在飛彈告警和IRST方面的套用。雜波抑制是探測不可辨目標的關鍵問題。解決雜波抑制的方法包括空間濾波、跟蹤檔案濾波、速度濾波和多光譜濾波。跟蹤檔案濾波器是最簡單的雜波鑑別器。對跟蹤檔案濾波器來說,最困難的是從連續幀中聯繫觀察結果的關聯問題。關聯通常是用時間投影來進行的,後者定義了下一個幀里的一個視窗,這一幀應該包含被跟蹤的物體。這個投影的精度直接取決於感測器的解析度,因而更高解析度的感測器是最佳選擇。速度濾波器工作在整個視景上,因為它們是檢波前濾波器。辨別速度的能力是這個方法成功的關鍵。由於確定慣性背景地形的LOS速率相對容易,因此速度濾波是把威脅從地形中隔離出來的最有效方法。一個波段以上的多光譜感測器是解決雜波抑制的好方法,它是基於這樣的一個前提,即威脅物體的光譜特徵有別於雜波特徵。一般情況下,它需要對2個或多個波段上點目標的IR特徵進行相對精確的測量。為IRST所作的主要工作是研製掃描的高解析度感測器。因為IFOV小,因此這種感測器可以提供良好的靈敏度和碧空範圍,但是在目標瞄準之間具有相對低的幀速率(小於1Hz)。有一個階段在EODAS上使用了凝視型感測器,結果表明,高幀頻、30Hz、像雜波抑制技術一樣,大大提高了速度濾波的效能。EODAS中IRST所需要的處理包括空間濾波與速度濾波在檢波前模式里的耦合。
套用實例
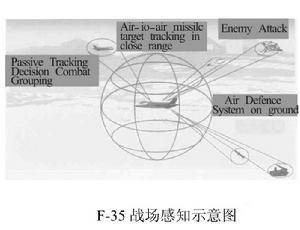
F-35
由於EODAS的
J-20
在2011號殲-20戰機的最新照片中,機頭下方新
