
定義
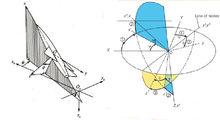
滾轉角定義為彈體的Oy軸與慣性坐標系的夾角。從彈體尾部沿縱軸往前看,若Oy軸位於鉛垂平面的右側,形成的滾轉角為正(轉動角速度方向與縱軸Ox軸的正向一致),反之為負(圖中的滾轉角為正)。
要了解滾轉角,首先需要了解機體坐標系。
機體坐標系(Aircraft-body coordinate frame)S-------OXYZ :
1)原點 O取在飛機質心處,坐標系與飛機固連
2) OX軸在飛機對稱平面內並平行於飛機的設計軸線指向機頭
3) OY軸垂直於飛機對稱平面指向機身右方
4)OZ軸在飛機對稱平面內,與OX軸垂直並指向機身下方
地面坐標系與機體坐標系關係如下圖:
 滾轉角
滾轉角機體坐標系與地面坐標系的關係是三個Euler角,反應了飛機相對地面的姿態。
其中滾轉角定義如下:機體坐標系 OZ軸與通過機體 OX軸的鉛垂面間的夾角,機體向右滾為正,反之為負。
測量方法
俯仰角和偏航角用雙頻干涉儀來測量可以達到很高的精度,而滾轉角的測量則是非常困難的,目前國內外還處於一種研究和探索階段。國內外的相關領域都對這一問題進行過研究,出現了以重力方向為基準的電子水平儀測量、以實物位置為基準的組合法測量、以準直雷射位置為基準的測量、以準直雷射方向為基準的測量、以準直雷射偏振方向為基準的測量。
1 重力方向基準測量法
機械導軌運動副的滾轉角誤差的檢測,例如水平導軌滾轉角的檢測,一般多採用電子水平儀進行檢查。
2 實物位置基準測量法
目前,組合測量法是一種靜態測量垂直導軌滾轉角誤差的有效方法。原理:以四方鐵的位置為基準,首先用安裝在垂直導軌上的測微儀分別在兩個不同的位置檢測同一個四方鐵的直線度,然後計算出垂直導軌的滾轉角誤差。
3 準直雷射位置基準測量法
由於穩定的雷射經過準直後具有穩定的直線性,因此可以用雷射光線來替代實物基準,可以探測運動部件的不同位置相對於雷射位置的變化。這種測量方式在原理上與組合測量法類似,只是用雷射基準替代了實物基準。優點是非接觸、能實現實時檢測,同時還可以採用半導體雷射經準直後替代雙頻雷射,達到減小體積的目的;其缺點是光源的穩定性會直接影響最終的測量精度。
4 準直雷射方向基準測量法
穩定的準直雷射具有穩定的方向性。這種方法的原理都是以準直雷射方向為基準。
6 準直雷射偏振方向基準測量法
基於雷射偏振方向的基準滾轉角測量方法是最近國內外研究的一大熱點。主要有以下幾種:法拉第磁光調製法、縱向塞曼雷射器法、橫向塞曼雷射器法、基於半導體雷射器的液晶光閥分時調製法。
滾轉角測量的關鍵有兩點:一是基準的建立。基準的穩定性是測量的關鍵所在。以上這些測量方法所建立的基準可歸結為兩類:位置基準和方向基準。二是滾轉角轉化為易於測量的物理量。
套用
滾轉角是三個Euler角之一,反應了飛機相對地面的姿態。通過滾轉角我們能夠了解飛行器的部分飛行狀態, 滾轉角能對飛行器狀態進行反饋,並進一步控制飛行器狀態。滾轉角是飛行器飛行狀態不可或缺的重要參數。
