
套用及要求
 汽車前碰撞預警毫米波雷達
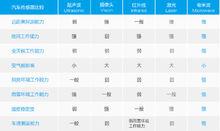
汽車前碰撞預警毫米波雷達汽車前碰撞預警毫米波雷達 則克服了紅外、雷射、攝像頭(光學技術價格低廉且技術簡單,但全天候工作效果不好)、超音波(受天氣狀態影響大,探測距離短,多用於倒車保護)上述幾種探測方式在汽車防撞探測中的缺點,具有穩定的探測性能和良好的環境適應性。而它不僅可測量目標距離,還可測量目標物體的相對速度及方位角等參數,是未來無人自動駕駛的必選感測器。此外,毫米波雷達結構簡單、發射功率低、解析度和靈敏度高、天線部件尺寸小,已成為汽車主動防撞雷達的首選。
 汽車前碰撞預警毫米波雷達
汽車前碰撞預警毫米波雷達交通運輸部發出關於貫徹落實交通運輸行業標準《營運客車安全技術條件》(JT/T 1094-2016)的通知 。《營運客車安全技術條件》下的技術要求第4.1.5條明確規定:9M以上的營運客車要求加裝車道偏離預警系統(LDWS)以及符合標準的前碰撞預警(FCW)功能,並在第5條標準實施的過渡期要求里明確規定了13個月的過渡期限。而LDWS系統和FCW系統的核心就是防撞雷達,而市場上能夠達到防撞性能指標的是毫米波雷達。
功能配置
 汽車前碰撞預警毫米波雷達
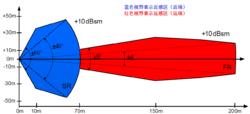
汽車前碰撞預警毫米波雷達前方探測感測器採用寬波束毫米波雷達,覆蓋範圍為前方70度角度內200米距離內的最多32個目標。可以及時有效的選擇車輛正前方的危險目標進行預警目標跟蹤。除了對同向正常行駛的車輛,同時對插隊車輛,橫穿車輛均能很好探測。
毫米波雷達的產品有這些
77G雷達;24G雷達;77G雷達用MMIC;77G雷達用PCB;24G雷達用MMIC;24G雷達用PCB
產品特色
汽車前碰撞預警防碰撞預警系統 進行三級預警,(可根據客戶需求進行多級別預警定製),安全預警三個級別分別為:
第一及第二級為安全距離預警 ,固定時間預警,根據本車速動態調整,速度越快,提醒距離越遠。智慧型提醒用戶在不同車速情況保持安全車距。
第三級為碰撞預警,固定預警時間,通過雷達測定相對速度,可理解為目標車與本車的速度差。本車速度大於前車速度,有撞擊可能,速度越大,提醒距離越遠。
 汽車前碰撞預警毫米波雷達
汽車前碰撞預警毫米波雷達前向雷達:AEB(自動制動),FCW(前方碰撞預警)ACC(自適應巡航控制)
後向雷達:BSD(盲點探測),LCA(變道輔助),RPC(後方碰撞預警),RCW(倒車預警)
發展歷史
當前的汽車前碰撞預警毫米波雷達主要有24GHz和77GHz兩個頻段。Wayking24GHz雷達系統主要實現近距離探測(SRR)已經廣泛用在植保無人機做為定高雷達使用,而77GHz系統主要實現遠距離的探測(LRR),或者是兩種系統結合使用,實現遠近距離的探測。
汽車前碰撞預警雷達微波防撞系統:當前市場上的代表廠家有:荷蘭NXP(恩智浦)、德國的Continental(大陸)Bosch(博士)、Wayking(渭成)。
