
內容
從諧波產生的原因來看,在理想乾淨的供電系統中,電流與電壓均為正弦波,在只含有線性元件的電路里,流過元件的電流與施加的電壓成正比,而當供電系統中存在數量可觀的非線性負荷時,流過元件的電流成為非正弦電流,該非正弦電流流回電網。所以當電網輸送的電能作用於用電設備時,將會受到來自用戶反作用的影響,系統中的諧波污染更多時候是由用戶產生的,而不是電力生產商或者供應商。為此,供電管理部門一方面要加強電力系統諧波的監管力度,另一方面還要對發現的諧波問題進行深入的研究,判定擾動方向,找到擾動源頭,明確責任,對擾動源進行技術和經濟上的懲罰,實現市場化管理,提高效率。
為了限制電網中的諧波污染,可以採用相應的標準、法規限定用戶的諧波注入量,使各級用電負荷分散就地解決各自的諧波問題,這是一種強制性的管理措施,許多國家和學術組織已經就此制定了限制電力系統諧波的標準和規定。美國電氣與電子工程師協會於 1981 年制訂了 IEEE-519 標準,國際電工委員會起草了 IEC61000 系列標準檔案,我國水利電力部於 1984 年也頒布了 SD 126—1984《電力系統諧波管理暫行規定》,國家技術監督局頒布了 GB/T 14549—1993《電能質量—公用電網諧波》和 GB/T 24337—2009《電能質量—公用電網間諧波》。這些標準的提出使諧波管理工作逐步呈現出科學化,規範化和法制化的趨勢,但是這些規定只是限制了諧波電壓和諧波電流的允許閾值,當用戶產生的諧波含量超標的情況下,為了使整個系統處於安全的狀態和保證電能質量水平,只能對超標的用戶進行拉閘限電。這明顯違背了電力系統的市場化原則,僅僅限制了諧波含量超標的用戶繼續排放,而對於那些諧波含量不超標但是卻較為嚴重的用戶來說,這種管理方式並沒有做出相應的懲處。這不符合我國發展智慧型電網的初衷。
為了實現高效的市場化管理,實現電網的可持續發展,國際上提出了一種“獎懲性方案”。獎懲性方案的具體思想是:系統與用戶在一定的範圍內交易時,如果系統中的電能質量沒有得到保障,用戶應當得到相應賠償;如果用戶產生的諧波污染量超出允許閾值,如果用戶產生的諧波污染量超出允許閾值,則系統在保證用戶正常供電的前提下要收取額外的“協助治理”費用。
獎懲性方案提出以後,國內外學者做了很多研究,這些研究主要集中在利用“干預式”或者“非干預式”的方法來區分公共連線點處的諧波污染究竟是來自系統還是用戶,但實際電網中存在多個諧波源負荷,關注母線處的諧波污染是由系統中所有的諧波源負荷共同作用造成的。當各個諧波源負荷相互干擾,或者是系統的諧波波動劇烈時,區分兩側諧波責任的方法僅僅只能區分出是系統還是用戶是諧波污染的主要來源,卻並不能細緻的劃分出系統中所有的諧波源各自的諧波貢獻度,事實上,只有具體的量化每個諧波源在關注母線處的諧波污染量,最終確認各方的責任大小之後才能對電網中這些主要諧波源負荷進行排序,確認首要的治理目標,對各個諧波源進行獎懲。所以,僅僅判斷干擾源的來源方向並不能解決上述問題,進行多諧波源諧波責任的定量評估是必要的,它是進行電能質量經濟評估的前提。
估計評估
來源
自 1794 年 C. F. Gauss 首先提出最小二乘估計起,回歸分析已經有 200 餘年的歷史,在這 200 年間,回歸分析受到廣泛套用,幾乎難以找到用不到它的領域,電力系統也不例外。
關注節點的諧波電壓與潛在的諧波源負荷的諧波電流之間存在一定的線性相關性,且這種線性相關性規律具有普遍性。此後,Mazin H E, Xu W, Huang B首次闡述了多諧波源諧波責任問題,並利用最小二乘估計計算了諧波責任。對於滿足基本假設的回歸模型,最小二乘估計可以得到較為理想的結果,但在實際問題研究中,最小二乘估計的回歸結果,卻總是不那么令人滿意,其中最著名的問題為:有些觀察值(稱為異常值)偏離假定的模式。簡單的操作錯誤、包含另一總體的少量樣本等都會產生異常值,異常值會對統計推斷產生嚴重的影響。鑒於此,利用 M 估計穩健回歸對多諧波源諧波責任進行劃分,以期得到優於最小二乘估計的結果。
基本原理
最小二乘估計基本原理是以殘差的平方和最小為估計準則的數學估計方法。1795年由C.F.高斯(C.F.Gauss)首先提出。
它是參數估計中較成熟的基本方法,並獲得廣泛的套用。在評估多諧波源諧波過程中:
 多諧波源責任劃分
多諧波源責任劃分 多諧波源責任劃分
多諧波源責任劃分 多諧波源責任劃分
多諧波源責任劃分設回歸變數y與一般變數 , ,…, 的線性回歸模型為:
 多諧波源責任劃分
多諧波源責任劃分 多諧波源責任劃分 多諧波源責任劃分
多諧波源責任劃分 多諧波源責任劃分 多諧波源責任劃分 多諧波源責任劃分
多諧波源責任劃分 多諧波源責任劃分 多諧波源責任劃分
多諧波源責任劃分 多諧波源責任劃分
多諧波源責任劃分y=β +β +β +...+β +ε
多諧波源責任劃分 多諧波源責任劃分 多諧波源責任劃分 多諧波源責任劃分 多諧波源責任劃分 多諧波源責任劃分 多諧波源責任劃分 多諧波源責任劃分其中,β ,β ,β ...β 是p+1個未知參數,β 稱為回歸參數,β1,…,βp稱為回歸係數。y 稱為因變數 , ,…, 為自變數,ε 為隨機誤差。
 多諧波源責任劃分
多諧波源責任劃分 多諧波源責任劃分
多諧波源責任劃分 多諧波源責任劃分
多諧波源責任劃分 多諧波源責任劃分
多諧波源責任劃分對於一個實際問題,如果獲得 n 組觀測數據( , ,…, ; )(i=1,2,…,n),則線性回歸模型寫成矩陣形式為: y = Xβ + ε。X是一個n×(p+1)階矩陣,稱為設計矩陣。對於該回歸模型,所謂的最小二乘估計,是尋找參數使離差平方和達到極小。
估計
最小二乘估計往往基於一些假設,如假設模型誤差是正態的,或者假設真實模型對每一個觀察值都成立。但在實際中,這些假設很難完全滿足,如當某些觀察值(稱之為異常值)偏離假定的模式。異常值的存在將嚴重影響最小二乘估計的分析結果,表現在現有的回歸模型不能很好地捕捉到數據的重要特點。
多諧波源責任劃分 多諧波源責任劃分 多諧波源責任劃分 多諧波源責任劃分
多諧波源責任劃分 多諧波源責任劃分
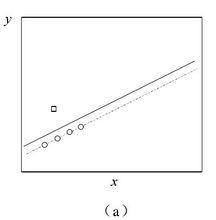
多諧波源責任劃分以下述簡單回歸模型y=β +β + ε為例來說明異常值的影響。 在圖 a中,異常值在 x 的分布中處於中央,因此若刪除這個奇異值,對於最小二乘回歸的斜率 與截距 幾乎沒有影響。在圖 b中,異常值在 x 值上有不尋常的值,因此,若將其刪除,將顯著影響斜率與截距。所以在圖 a中的值稱為弱影響點,在圖 b中的值稱為高影響點。在圖c中,最後一個值對回歸係數沒有影響,即使它是一個高影響點,原因在於這個觀測值沒有離開剩餘的數據組成的直線。
 a
a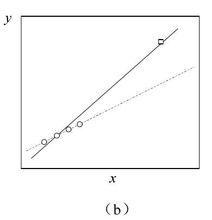 b
b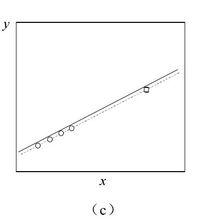 多諧波源責任劃分
多諧波源責任劃分異常值會影響到回歸方程的參數估計,為了抑制異常值對參數估計的影響,許多研究者進行了探索,直到 1964 年,Huber 發表了《位置參數的穩健估計》一文,提出了極小極大理論,才正式為減弱異常值干擾的方法提出了理論依據。1973 年,他又把該方法套用於一般的多元線性模型。
M 估計的基本思想是採用疊代加權最小二乘估計來計算回歸係數。該方法通過對不同的點施加不同的權重來減小遠端數據的影響,具體實施方法為對殘差小的點給予較大的權重,對殘差大的點給予較小的權重,據此建立加權最小二乘估計。權重係數的確定需通過反覆疊代來使其改變數小於一定的允許誤差,以此來達到穩健的目的。
對比
一般情況下,M 估計和最小二乘估計均可以有效評估諧波責任,M 估計的評估結果更加接近真實值。但某些情況下,如樣本數據中出現高影響點時,最小二乘估計遠遠偏離真實情況,甚至出現了負責任(負責任表示該諧波源對關注節點的諧波電壓有抵消作用),該種情況下最小二乘估計無法正確評估諧波責任,此時 M 估計的優越性將更加凸顯。
嶺估計
套用最小二乘估計求解多元回歸模型需要滿足係數矩陣滿秩這一條件。實際情況中這一條件往往得不到滿足,各諧波源的諧波電流數據可能並不相互獨立。為解決該問題,套用嶺估計,通過仿真算例驗證,在係數矩陣非滿秩(以下稱之為病態)情況下,嶺估計優於最小二乘估計。雖然最小二乘估計中 M 估計亦優於最小二乘估計,但在係數矩陣嚴重病態情況下,M 估計疊代次數過多,甚至不收斂,需要降低精度進行求解,精度降低又會降低解的準確度。
嶺估計原理
嶺估計的基本思想是:在自變數信息矩陣的主對角線元素上人為地加入一個非負因子 k ,從而使回歸係數的估計稍有偏差、而估計的穩定性卻可能明顯提高的一種回歸分析方法。它是最小二乘估計的一種補充,近年來,在經濟、工業生產、工程技術、環境保護等方面已有一定的套用。
 多諧波源責任劃分
多諧波源責任劃分多元線性回歸模型的矩陣形式為: y = Xβ + ε 其中, y 為 h 維測量量, X 為 h×s 係數矩陣, β 為 s 維待估參數向量, ε 為 h維誤差向量。 該式的最小二乘解是當係數矩陣 X 呈病態,即 X 的列向量之間有較強的線性相關性時,變數之間將出現嚴重的多重共線性,此時 X求逆會很不穩定,最終導致計算出的 βˆ與真實值有較大偏差,甚至有時候會出現與實際意義不相符的正負號。針對係數矩陣病態問題,數學上通常用嶺估計來克服係數矩陣的病態性,它是一種在均方誤差意義下優於最小二乘估計的方法,根據吉洪諾夫(Tikhonov)正則化原理可進行推導。
半參數
最小二乘估計與嶺估計方法評估多元諧波責任,考慮的是主要諧波源已知情況下評估多諧波源系統的諧波責任。但實際情況是電網可能產生一定的諧波污染,系統中少量的功率較小的未知諧波源也會產生一定量的諧波污染,當他們在公共連線點處產生的諧波電壓與已知的主要諧波源產生的諧波電壓有一定可比性時,就需要考慮它們的影響。此時套用最小二乘估計與嶺估計方法評估多元諧波責任模型及方法,可能會造成諧波阻抗估計準確度不高,進而無法準確計算諧波責任。因此,有學者提出並套用半參數嶺估計來求解多諧波源諧波責任問題。
半參數嶺估計算法
 多諧波源責任劃分 多諧波源責任劃分
多諧波源責任劃分 多諧波源責任劃分是在非主要諧波源負荷在S母線產生的h次諧波電壓,稱之為殘餘諧波電壓,這個諧波電壓相對於主要諧波源負荷產生的諧波電壓是很小的,因此不用考慮其是否波動的情況。但在考慮諧波污染的情況下, 並不是一個可以忽略不計的誤差量,所以多元回歸模型 y = Xβ + ε 重新定義為如下形式: y = Xβ + V+ ε。 式中,y 為 h 維測量量,X 為 h×s 係數矩陣,β 為 s 維待估參數向量,V 為未知光滑參數, ε 為 h 維誤差向量。
套用場景
(1)根據所建立的多元回歸模型劃分多諧波源諧波責任,用傳統最小二乘估計進行回歸時需要滿足係數矩陣滿秩這一條件,但實際情況這一條件往往得不到滿足,在電網中各諧波源的諧波電流數據可能並不相互獨立,為了克服該問題,提出了嶺估計。本章從病態產生的原因開始分析,介紹了嶺估計的原理、性質及嶺參數 k 的選擇方法。從理論上證明嶺估計可以在諧波電流數據線性相關,即係數矩陣病態時較好地改善病態解,從而使計算的諧波阻抗更接近真實值,進而更好地計算諧波責任。
(2)通過係數矩陣非病態情況、病態情況,病態情況又分為集中式多諧波源和分散式多諧波源兩種情況驗證本文方法的可行性。仿真結果表明,在諧波電流數據非病態情況下,三種方法均能得到較為接近真實值的結果;而在諧波電流數據病態情況下,最小二乘估計失效,嶺估計能較好的計算出相應的諧波阻抗值,且計算量小,M 估計依賴於數據選擇且與所設定精度相關,數據相關性嚴重的情況下 M 估計需要疊代的次數比較多,甚至不收斂,降低精度後難以得到正確結果,數據相關性一般情況下,M 估計準確度與精度的選擇相關,計算準確度也有所下降。相比之下,嶺估計方法簡單,計算方便。
(3)前兩種所涉及的前提是所有主要諧波源已知,當存在一定數量的未知諧波源且它們在公共連線點處產生的諧波電壓與已知的主要諧波源產生的諧波電壓有一定可比性時,模型和算法失效。本章提出了半參數嶺估計算法並通過仿真驗證當不存在未知諧波源時,原有模型及方法在諧波電流數據病態及非病態情況下可以得到較好的結果,但在含有未知諧波源的同等條件下,原有模型及方法的計算準確度大大下降,本章模型及方法在病態及非病態的情況下均較為接近真實值。
